Серворуль что это
серворуль | это... Что такое серворуль?
серворуль — серворуль … Орфографический словарь-справочник
серворуль — (2 м), Р. серворуля/; мн. серворули/, Р. серворуле/й … Орфографический словарь русского языка
серворуль — сервору/ль, я/ … Слитно. Раздельно. Через дефис.
Сервокомпенсация — (от лат. servus раб, слуга) использование вспомогательных рулевых поверхностей для уменьшения усилий в системах управления самолётов, вертолётов, ракет. Вспомогательная поверхность относительно небольшой площади, размещаемая обычно на… … Большая советская энциклопедия
сервоуправление — Схема сервоуправления. сервоуправление отклонение основного органа управления летательного аппарата с помощью аэродинамических сил, возникающих на нём при отклонении сравнительно небольшой рулевой поверхности серворуля. Серворуль… … Энциклопедия «Авиация»
сервоуправление — Схема сервоуправления. сервоуправление отклонение основного органа управления летательного аппарата с помощью аэродинамических сил, возникающих на нём при отклонении сравнительно небольшой рулевой поверхности серворуля. Серворуль… … Энциклопедия «Авиация»
сервоуправление — Схема сервоуправления. сервоуправление отклонение основного органа управления летательного аппарата с помощью аэродинамических сил, возникающих на нём при отклонении сравнительно небольшой рулевой поверхности серворуля. Серворуль… … Энциклопедия «Авиация»
сервоуправление — Схема сервоуправления. сервоуправление отклонение основного органа управления летательного аппарата с помощью аэродинамических сил, возникающих на нём при отклонении сравнительно небольшой рулевой поверхности серворуля. Серворуль… … Энциклопедия «Авиация»
Сервоуправление — отклонение основного органа управления летательного аппарата с помощью аэродинамических сил, возникающих на нём при отклонении сравнительно небольшой рулевой поверхности серворуля. Серворуль расположен вдоль задней кромки органа управления и… … Энциклопедия техники
Ту — марка самолётов, созданных в ОКБ, организованном А. Н. Туполевым, см. Авиационный научно технический комплекс имени А. Н. Туполева. Самолётам, проектировавшимся в 1922 37, присваивалось наименование «АНТ» (Андрей Николаевич Туполев), а с 1942 они … Энциклопедия техники
Radiomize — «многофункциональный» руль для любой машины / Хабр

Если вы покупали автомобиль в салоне, выбирали ее комплектацию и опции, то знаете, сколько стоит “многофункциональный руль”, помогающий управлять бортовой развлекательной системой. Знают это и ребята из австралийского стартапа, придумавшие свою версию “умного” руля. Проект Radiomize всего за неделю собрал необходимую сумму для запуска и, похоже, останавливаться не собирается.

Как создать в своем автомобиле развлекательную систему не хуже, чем в представительских лимузинах, но дешевле на порядок (а то и два), знают продвинутые пользователи современной электроники. Хорошая компонентная акустика, качественные провода, усилитель плюс ваш планшет или смартфон. На таком базовом комплекте, подбирая и относительно недорогие элементы, можно запросто построить полноценную медиасистему. Вопрос будет решен с достойным звуком, изображением, навигацией и мониторингом систем работы самого автомобиля (если установить беспроводной датчик OBD-II).
А если к этому всему добавить подобие многофункционального руля, причем по цене всего $69, то всю систему можно считать завершенной.
Конструкция
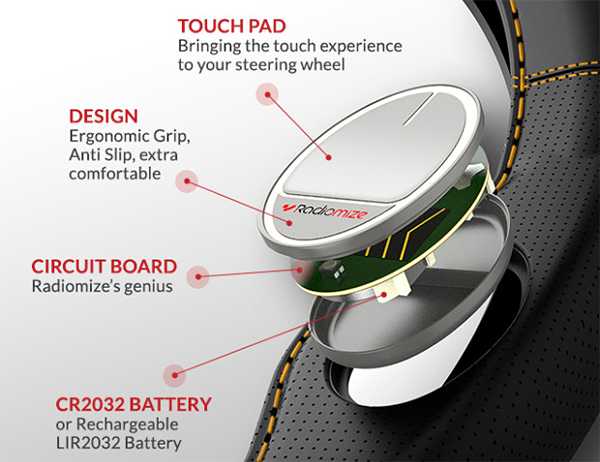
Самый главный плюс Radiomize — его универсальность. Ведь конструктивно это обычный, но хорошо сделанный, чехол на руль с вмонтированным в него сенсорным тачпадом:
Поэтому надеть его на руль легковой машины — не проблема. Процесс занимает 60 сек, как демонстрируют создатели на странице проекта.

Сшит чехол из синтетики, напоминающей натуральную кожу. Контрастная строчка, обработка антибактериальным составом, перфорация.
Тачпад с начинкой работает от литиевой батареи, заряда которой хватает на год активной эксплуатации.
Как работает
Radiomize функционирует в связке с приложением, которое устанавливается на Android или iOS. Сейчас многие используют в качестве навигатора планшеты, которые тоже синхронизируются с собственным почтовым ящиком, с аккаунтами в соцсетях, да и закачка музыки доступна без проблем. Подключаетесь через AUX-разъем к бортовой акустике, и вперед. Абсолютно вся входящая информация плюс развлечения у вас перед глазами.
Устанавливаете приложение Radiomize и управляете режимами с помощью тачпада, не отрывая глаз от дороги.
Предусмотрены несколько режимов функционирования:
- правая кнопка — переход к следующему треку, прием и чтение сообщений, выбор и ответ на сообщения (только при остановке)

- левая кнопка — все то же самое, только переход осуществляется к предыдущему треку

- нажатие и удержание кнопок — изменение громкости:

- двойное нажатие — в зависимости от кнопки: пропускаете треки и сообщения; включаете режим воспроизведения или ставите на паузу

- скольжение — функция пролистывания
Устройство также снабжено SOS-датчиком, рассылающим по пяти выбранным адресам сообщения о дорожном инциденте.
Связь Radiomize с вашими устройствами осуществляется по Bluetooth Low Energy.
Оплата и доставка
Устройство можно заказать на странице проекта по цене $69, доставка в Россию стоит всего $10. По такой же цене и мы можем его привезти. Но если у вас сборная посылка из США, то выгоднее воспользоваться нашими услугами — цены на доставку начинаются от $9.
Руль для велосипеда - как выбрать и какие бывают?
Особенности велосипедного руля напрямую определяют ездовые характеристики байка. Сегодня индустрия велоспорта предлагает множество вариантов этих комплектующих: классические прямые рули для горных велосипедов, шоссейные «бараньи рога», рули в форме усов для городских моделей, рули-бабочки, cowhorn (коровьи рога) для гонок с раздельным стартом и другие. Поэтому велосипедисты не испытывают сложностей с выбором оптимальной конструкции.Как руль влияет на ездовые характеристики велосипеда?
Каждый тип руля предназначен для определенной категории велосипедов. Это важная составляющая байка, на которой не принято экономить. Помимо очевидных функций, связанных с контролем управления, он ответственен за другие не менее важные характеристики, от которых зависит комфорт и безопасность езды.
Положение рук. Постоянная смена хвата во время катания на велосипеде, особенно при длительных заездах, позволяет избежать возникновения болевого дискомфорта в кистях и области запястий. Количество доступных положений для рук определяется конструктивными особенностями руля. Он может быть как с одной, так и двумя, тремя и даже четырьмя позициями для хвата.
Смена статичной позы рук позволяет избежать избыточной нагрузки на суставы и способствует улучшению кровотока в кистях. Это значит, что даже при непрерывной многочасовой езде руки велосипедиста не будут страдать от онемений и болевых ощущений. Смена хвата также позволяет перераспределить нагрузку, припадающую на тело. Это важно не только для отдыха рук или спины, но и, к примеру, при преодолении подъемов, когда смена положения рук на руле позволяет приложить максимум усилий для педалирования.
Посадка. Положение тела райдера является главным фактором, от которого зависит удобство езды в том или ином стиле. Наравне с особенностями рамы и конфигурацией седла, руль определяет посадку велосипедиста.
Рули городских байков во многом обеспечивают т.н. прогулочную посадку, когда спина находится почти перпендикулярно земле, за счет чего снижается нагрузка на мышцы рук, ног и поясницу. Шоссейные «бараньи рога» позволяют достичь гоночной посадки, когда спина практически параллельна земле, и все нагрузки на мышцы распределяются максимально сбалансировано. Прямые рули горных велосипедов определяют туристическую посадку, сочетающую в себе преимущества прогулочной и гоночной.
Как сменить руль и не совершить ошибку?
Руль должен быть совместим с типом велосипеда. Это важное, но не единственное правило, которого следует придерживаться тем, кто принял решение о замене данной комплектующей.
Вынос. Важно чтобы руль был совместим с выносом – компонентом велосипеда, который соединяет рулевую поперечину со штоком вилки. Под конкретные выносы подходит лишь определенный размер руля. Так для горных байков и гибридов диаметр зажима выноса составляет 25,4 мм или 31,8 мм, а для шоссейника – 26 мм. Принимая во внимание этот параметр следует подбирать нужный диаметр рулевой трубы.Исходя из количества болтов, которые фиксируют руль, выделяют двух- и четырехболтовые выносы. Первые обеспечивают менее прочное соединение, и их используют преимущественно на городских велосипедах, которые не так подвержены ударным нагрузкам. Выносы также имеют различный вес и длину. Если вы приобрели руль другой формы или высоты, добиться оптимальной посадки и положения рук можно путем подбора более длинного или короткого выноса, с нужным углом.
Место под рулевые рога. Если вы планируете установку этих функциональных дополнений на свой горный велосипед, выбирайте более широкий руль. Посадочное место каждого рога «съедает» порядка 4 см длины руля. Это значит, что установив такие аксессуары, полезная длина рулевой перекладины станет короче на 8 см.
Совместимость с тормозными ручками и шифтерами. Выбирая новый руль для велосипеда, обратите внимание на то, чтобы ширина трубы соответствовала посадочному диаметру крепления тормозных рычагов и механизмов переключения скоростей (шифтеров). Также ориентируйтесь на тип имеющихся переключателей: триггерные (двухрычажные) механизмы и системы типа Grip Shift (поворотные шифтеры) отличаются различной длиной посадочного места на руле. С равнением на эти особенности подбирают оптимальную длину руля.
Рули для горных велосипедов
Стандартная длина рулей для горных байков варьируется в диапазоне от 580 до 660 мм. Для более агрессивного катания, такого как даунхилл или фрирайд, производители предлагают более длинные модели – 650-710 мм. Чем шире рулевая перекладина, тем большей управляемостью обладает велосипед. Но в этом вопросе лучше не переусердствовать, поскольку варианты превышающие 620 мм окажутся удобными уже далеко не всем велосипедистам. На женские горные байки следует ставить более узкие рули.
Рули для маунтинбайков бывают двух типов – прямые и с подъемом. Последние слегка завышают посадку велосипедиста, делая ее оптимальной для смешанного катания по ровной и пересеченной местности. Прямые рули подходят для тех, кто предпочитает такие стили как кросс-кантри или марафон. Помимо подъема рули для МТВ могут иметь небольшой изгиб. Обычно его делают на широких моделях, чтобы руль стал более удобным в управлении.
Самыми бюджетными вариантами являются стальные модели или изготовленные из хромомолибденового сплава: они прочные, но довольно тяжелые. Подавляющий процент современных маунтинбайков комплектуют рулями из алюминиевого сплава. Они отличаются оптимальным соотношением трех ключевых параметров: цена, вес и прочность. Премиальный сегмент – это рули из карбона и титана. Они прочные и максимально легкие, но их цена выступает сдерживающим фактором для многих велосипедистов.
Модернизировать руль горного байка для двухпозиционного положения рук можно при помощи уже упомянутых рогов. Они позволяют не только расслаблять руки и перераспределять нагрузку, но и надежно защищают кисти при падениях. Устанавливают рога почти параллельно выносу. Если длина вашего руля превышает 620 мм от установки таких дополнений лучше отказаться. Также не рекомендуется ставить рога на рули, изготовленные из карбона.
«Бараньи рога» и их особенности
Изогнутый руль, получивший устоявшееся название «бараньи рога», устанавливают на шоссейные велосипеды, ориентированные на продолжительную скоростную езду по ровному дорожному покрытию. Конструкция обеспечивает гоночную посадку велосипедиста, с сильным наклоном вперед. Такое положение позволяет не только максимально сбалансировать нагрузку на все мышцы, но и существенно улучшить аэродинамику.
Шоссейный руль имеет четыре позиции для рук, что позволяет менять посадку велосипедиста в зависимости от условий езды. На ровных скоростных участках можно принимать горизонтальную посадку. Изменив хват и выпрямив спину, вам будет максимально комфортно при подъемах и езде на средних скоростях.
«Бараньи рога» позволяют фиксировать руль вертикальными ладонями. Такой хват дает возможность полностью разгрузить лучезапястный сустав и перенести всю нагрузку на мускулатуру рук. Изогнутый руль незаменим при длительных поездках без остановок на отдых.
Анатомия шоссейного руля выглядит следующим образом
«Бараньи рога» подразделяют на два типа:
- Мелкие ( итальянский формат) с короткой длиной дропов до 138 мм.
- Глубокие ( бельгийский формат) с удлиненными дропами от 150 мм и более.
Но это лишь общая классификация. Существует несчетное количество вариаций шоссейных рулей, с самой разной конфигурацией изгибов и наклонов.
Бараньи рога часто дополняют аэродинамическим рулем – специальными локтевыми упорами с вынесенными вперед ручками. Благодаря ему спортсмен может группироваться в лежачее положение, сводя к минимуму сопротивление встречного потока воздуха и полностью расслаблять руки. Такое дополнение увеличивает аэродинамическую эффективность посадки, но существенно ухудшает управляемость велосипедом.
Треккинговые рули-бабочки
Благодаря своей замысловатой конфигурации руль обеспечивает более четырех различных вариантов хвата. Этого достаточно, чтобы постоянно менять положение рук и сохранять комфорт при передвижении. Рули-бабочки незаменимы в длительных велопоходах: при езде по ровным трассам и пересеченной местности.
Устанавливать такую конструкцию можно в различном положении: дропами к себе или, наоборот, от себя, чтобы максимально вытягиваться вперед при езде на больших скоростях. По всей длине руль снабжен поролоновой или полиуретановой накладкой, которая обеспечивает комфортный и надежный хват, без соскальзывания рук и натираний при продолжительном катании. Рули-бабочки рассчитаны на вынос с диаметром 25,4 мм.
Рули-усы
Логика устройства этих рулей схожа с вышеописанными моделями-бабочками, но они не имеют последнего закругления. Поэтому здесь меньше позиций для рук, но и их вполне достаточно, чтобы постоянно менять хват, переходить в высокую или низкую посадку, давая возможность отдыхать телу при длительной езде. Отличительной особенностью рулей-бабочек от треккинговых аналогов является их уменьшенный вес. Данная модель ориентирована под вынос руля диаметром 25,4 или 26 мм.
Рули типа «коровьи рога»
Руль данного типа, также именуемый Сowhorn, является трехпозиционным. В среде велоспортсменов он ценится за свою универсальность. Он оптимален для длительных туристических заездов и скоростных прогулок по шоссе. «Коровьи рога» отлично зарекомендовали себя как при езде по ровному асфальту, так и бездорожью. Также как и на треккинговых моделях, на этом руле можно вытягиваться вперед, создавая отличную аэродинамическую посадку для катания на больших скоростях. Модели типа Сowhorn рассчитаны на выносы диаметром 25,4 мм или 26 мм.
Особенности рулей для BMX
Трюковые велосипеды выдвигают особо высокие требования к прочности и жесткости рулевых элементов. Помимо этого при выполнении экстремальных дисциплин важную роль играет точность и отзывчивость управления, которое обеспечивается рулем.Для повышения этих характеристик рули для BMX изготавливают с высоким подъемом и относительно небольшим разлетом ручек. За счет данных особенностей обеспечивается не только отзывчивость управления, но и прямая посадка с максимально ненагруженными руками. Чтобы сделать руль более устойчивым к ударным нагрузкам, его снабжают дополнительной перемычкой, приваренной на уровне ручек. Таким образом достигается наиболее жесткая и надежная трапециевидная форма.
Рули для прогулочных велосипедов
На дорожные велосипеды традиционно устанавливают поднятый, вертикальный руль, обеспечивающий прямую посадку, в которой разгружаются руки и улучшается обзор. Прогулочные рули самые широкие. Это делают для того, чтобы велосипедист прикладывал минимальные усилия при управлении. За счет этого существенно ухудшается маневренность, которая, впрочем, не является приоритетным фактором для ситибайков. Существует несчетное количество вариаций рулей для городских велосипедов.тачскрины вместо кнопок — журнал За рулем
Компания Hyundai разработала новый виртуальный салон для хэтчбека i30, в котором вместо кнопок на руле используются сенсорные панели.
Материалы по теме
В современных автомобилях появляется все больше мониторов. Они используются вместо аналоговых циферблатов на панели приборов и устанавливаются на центральной консоли, иногда по два в ряд.
Новая разработка Hyundai, получившая название «будущее салона автомобиля», выводит использование мониторов на новый уровень: сенсорные экраны предлагается размещать также на руле. С их помощью можно управлять различными системами автомобиля.

В качестве объекта демонстрации новой технологии был выбран салон хэтчбека i30. Он оборудован центральным сенсорным экраном, цифровой приборной панелью и двумя маленькими экранами на руле, расположенными непосредственно под большими пальцами рук водителя. Почему Hyundai выбрала для демонстрации i30, а не седан бизнес-класса, например?
«Мы выбрали i30, чтобы продемонстрировать, что инновации не ограничиваются автомобилями более дорогих сегментов. Hyundai намерена доказать, что инновации должны быть доступны большому числу клиентов», — отмечает старший инженер Human Machine Interface технического центра Hyundai Motor Europe Реджина Кайзер.
В Hyundai считают, что нововведение должно облегчить жизнь водителей, сделав управление бортовыми системами интуитивно понятным и удобным. Сенсорные экраны на руле имеют пять конфигураций кнопок и просты в использовании.
Следует отметить, что это уже четвертая итерация виртуальной кабины Hyundai. Первая версия была представлена в 2015 году, и с тех пор компания вносит в нее доработки. Четвертая версия получила не только сенсорные экраны на рулевом колесе, но и многослойную цифровую панель приборов: в ней используется два монитора, расположенные друг над другом на расстоянии шести миллиметров и создающие эффект 3D. Предположительно, информация с такого, двойного, экрана лучше воспринимается водителем.
Эта виртуальная кабина никогда не появится на серийном автомобиле. Проект используется для демонстрации новых концептуальных технологий, которые впоследствии будут внедряться в машины.
Hyundai готовит к продажам самый маленький кроссовер, фотографии и видео которого уже появились в Сети.
Также скоро на рынок выйдет новое поколение седана Sonata.
Фото, видео: Hyundai
Что нам мешает управлять и как с этим бороться.
Здравствуйте!
Все мы привыкли понятие «надежная опора» связывать с твердой поверхностью. Для автомобиля — это земля. Прочнее не придумаешь. Любой может попробовать и почувствовать. Воздух же — субстанция ненадежная, но именно она является, так сказать, средой обитания многочисленной армии аппаратов тяжелее воздуха, самолетов и вертолетов.

Самолет L-410. Хорошо видны сервокомпенсаторы руля высоты и руля направления.
И именно она же предоставляет им большие возможности, делая пребывание этих металлических птиц в сотнях и тысячах метров над землей вполне комфортным.
Специфика, понятно, тут другая, и хотя определенные термины, используемые для машин, передвигающихся по твердой поверхности на 4-х колесах для самолета звучат также, на этом сходство, в общем-то, и заканчивается.
Устойчивость, управляемость, балансировка, центровка. Без всего этого и еще много чего другого в воздухе не обойтись. Причем все эти вещи зачастую между собой связаны.
Для раскрытия своих возможностей самолет использует аэродинамические поверхности.
Все движение и ориентация его в воздухе основано на действии различных сил и моментов, большая часть из которых в той или иной степени носит аэродинамическую природу. Эти силы и порождаемые ими моменты формируются при взаимодействии аэродинамических поверхностей с воздушным потоком.
Силы и моменты, различные по местам приложения и воздействия, можно поделить на полезные и вредные. Это ни у кого не вызывает сомнений :-), как, впрочем, и тот факт, что в основе совершенствования аэродинамики летательного аппарата лежит необходимость увеличения всего того, что полезно, и уменьшение того, что вредно.
Делается все это различными способами и в связи с этим имеет место такое понятие как компенсация. То есть вероятно, что какое-то нежелательное воздействие не может быть устранено, но может быть скомпенсировано, что в общем-то равносильно его устранению.
Чего же такого вредного нужно компенсировать во время полета самолета? Да, в общем-то, хватает всякого. Но сегодня остановимся на моменте аэродинамических сил, носящим, на мой взгляд, несколько экзотическое название. Это шарнирный момент. Название его вроде бы на связь с аэродинамикой не указывает, но на самом деле связь прямая.
Все просто. Любая управляющая поверхность самолета связана с остальной конструкцией через шарнир. Отклоняясь в процессе управления, она испытывает на себе действие аэродинамической силы, которая, относительно точки вращения этой поверхности (то есть центра шарнира) как раз и образует момент, по понятным уже причинам именуемый шарнирным.
Отчего зависит его величина и в чем, собственно, состоит его вредность? Хотя правильнее видимо все же будет упомянуть не только о вредности, но и о полезности шарнирного момента. Поэтому подкорректируем вопрос: в чем его вред, а в чем польза, если она есть?
О величине.
Величина момента, как известно, определяется величинами силы и плеча этой силы. Для нашего случая величина аэродинамической силы зависит от площади управляющей поверхности. А плечо определяется ее хордой (то же, что и хорда профиля), так как чем длиннее хорда, тем дальше точка приложения силы (то есть центр давления управляющей поверхности) от точки поворота (то есть центра шарнира).
Понятно, что с увеличением геометрических размеров летательного аппарата, требующих увеличения потребных размеров рулей, шарнирный момент тоже увеличивается. Увеличивается он так же с ростом угла отклонения управляющей поверхности.
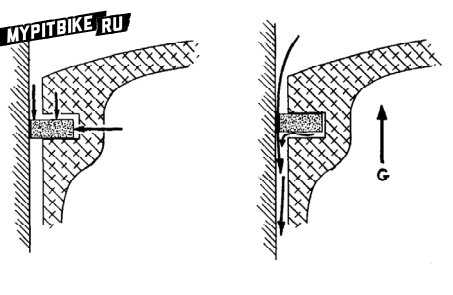
Схема возникновения шарнирного момента.
Кроме того шарнирный момент растет с с увеличением числа М. Здесь причины две. Первая – это рост скоростного напора, вызывающий увеличение аэродинамической силы. Вторая причина, более характерная для больших скоростей связана с тем, что при переходе от дозвуковых скоростей к сверхзвуковым центр давления аэродинамических поверхностей (в том числе и управляющих) смещается назад (об этом я упоминал здесь).
Это смещение естественно вызывает увеличения плеча приложения силы (относительно шарнира) и, в конечном итоге, рост величины шарнирного момента. Эта величина может быть значительной, так что самое время вспомнить о вреде.
О вреде.
Шарнирный момент присутствует безусловно, а на больших самолетах или же на больших скоростях (или же при том и другом вместе) он может достигать просто таки чрезмерных величин.
Так как создаваемое усилие передается на элементы системы управления, то они безусловно должны обладать определенной прочностью для того, чтобы выдержать все эти нагрузки. А увеличение прочности очень часто означает увеличение массы, что ни для какого летательного аппарата никак нельзя назвать положительным фактором.
Кроме того есть в системе управления одно звено, которое, в общем-то, невозможно ни упрочнить, ни усилить. Это пилот, воспринимающий на себя через органы управления в кабине воздействие шарнирного момента на управляющие поверхности.
Так как создаваемое усилие передается по элементам системы управления на ручку управления самолетом и педали в кабине, то летчик при пилотировании будет вынужден испытывать и преодолевать нагрузки, иной раз очень большие, а при определенных условиях полета (на соответствующей технике, конечно) может просто не справиться с управлением. Не хватит мускульной силы…
Пилоту, как и любому человеку, к сожалению свойственно уставать. Поэтому, даже если величины шарнирного момента не стол грандиозны, все равно практически всегда существует необходимость его уменьшения, то есть частичной или даже полной компенсации, для избавления летчика от лишних нагрузок при пилотировании.
Это чаще всего означает наличие дополнительных систем на самолете, то есть все та же лишняя масса. Конечно, она может быть и небольшой, в виде нескольких малоразмерных тяг или электрических исполнительных механизмов, но может быть и в виде тяжелых систем гидроусиления (об этом ниже), когда летательный аппарат вынужден возить с собой набор массивных болванок бустеров и систему их обслуживания. Вред налицо :-). Ну, а что же о пользе?
Вредные и полезные нагрузки.
Режим полета летательного аппарата в общем случае может быть либо маневренным, когда аппарат выполняет какие-либо кратковременные эволюции в полете, либо установившимся.
Когда самолет длительно находится в каком-то установившемся режиме полета, штатном или нештатном (например, в наборе высоты или при несимметричности тяги двигателей), то летчик, в зависимости от условий, бывает вынужден так же длительно прикладывает некоторые усилия к органам управления для сохранения этого режима (то есть сбалансированности самолета), тем самым противодействуя шарнирному моменту. Эти усилия называются балансировочными. Они лишь только утомляют летчика, поэтому от них желательно избавляться.
На маневренном режиме и усилия прикладываются так называемые маневренные. Природа их возникновения все та же, но значение несколько иное. Конечно, от них летчик тоже устает, но совсем от них избавляться нельзя. Ведь в соответствии с этим нагрузками, которые летчик ощущает на ручке управления и педалях, он осуществляет пилотаж. Они позволяют ему судить об интенсивности маневра, о перегрузке и поведении самолета.
В этом как раз и заключается польза (хоть и косвенная) шарнирного момента.
Исходя из всего этого и разработаны различные конструкторские решения для борьбы с шарнирным моментом. Принцип их применения во многом зависит от характера нагрузок, которые летчик воспринимает через ручку управления и педали в кабине, то есть в общем-то от режима полета.
Способы компенсации шарнирного момента.
В первую очередь будем говорить о так называемой аэродинамической компенсации.
Суть ее состоит в полезном использовании энергии набегающего потока воздуха. В результате определенных конструктивных решений на управляющих аэродинамических поверхностях (рулях) создаются условия для возникновения момента сил аэродинамической природы, сопоставимого по величине с шарнирным моментом, но направленного в противоположную сторону.
Этот вновь возникающий момент частично или полностью компенсирует шарнирный, тем самым снимая с ручки управления лишние нагрузки и облегчая пилотирование. Природа его возникновения аналогична природе возникновения «нашего вредного» момента, и по сути дела он из себя представляет точно такой же шарнирный момент, только возникающий на, так сказать, специально отведенных для этого местах.
Осевая компенсация.
Это один из самых распространенных видов простейшей аэродинамической компенсации. Распространена осевая компенсация благодаря ее простоте и эффективности, а так же из-за того, что она не уменьшает эффективность самого руля. Суть ее в том, что ось вращения рулевой поверхности смещена назад, ближе к ее центру давления (то есть точке приложения аэродинамической силы). В этом случае шарнирный момент уменьшается за счет уменьшения плеча этой силы.
Осевая компенсация.
Такая компенсация применяется в том числе и на многорежимных самолетах (оборудованных системой гидроусиления), летающих как на дозвуковых, так и на сверхзвуковых скоростях. Она необходима для оптимальной разгрузки системы управления и снижения потребной мощности гидроусилителей на всех числах М полета, а также для обеспечения возможности аварийного перехода на ручное управление в случае отказа системы гидроусиления. Осевая компенсация цельноповоротных стабилизаторов таких самолетов часто выполняется с «перекомпенсацией».
Это означает, что на дозвуковых скоростях точка приложения аэродинамической силы (центр давления) при отклонении стабилизатора находится впереди оси вращения и способствует дальнейшему отклонению стабилизатора в крайнее положение (то есть разгружает его). На сверхзвуковых скоростях точка приложения аэродинамической силы смещается назад за ось вращения. Но, вследствие перекомпенсации на дозвуке, плечо силы на сверхзвуке получается небольшим, а значит небольшим остается и шарнирный момент.
Роговая компенсация.
Другой вид простейшей аэродинамической компенсации — это роговая компенсация. Она обычно реализуется на рулевых поверхностях килей и стабилизаторов мало- и среднескоростных самолетов.
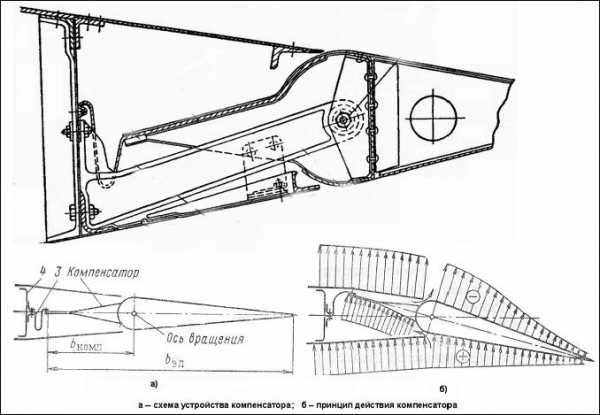
В этом варианте управляющая поверхность снабжена так называемым роговым компенсатором. Он представляет собой часть этой поверхности (выступ), расположенную перед ее осью вращения и спрофилированную так, что в нейтральном положении она формирует законцовку киля или стабилизатора.
А при отклонении рулевой поверхности она выдвигается в поток (появляется рог)и на ней формируется аэродинамическая сила, момент которой относительно оси вращения рулевой поверхности направлен в сторону, обратную направлению шарнирного момента.

Принцип роговой компенсации.
Существенный недостаток роговой компенсации, основательно снизивший ее применение в современной авиации, — это ухудшение условий обтекания аэродинамических поверхностей при полете на больших скоростях и при больших углах отклонения рулей на различных углах атаки, что вызывает ощутимое повышение лобового сопротивления и возникновение вибраций конструкции.
Для уменьшения этого эффекта роговая компенсация может быть использована в комплексе с осевой. Они дополняют друг друга и позволяют расширить диапазон их применения для различных режимов полета, тем более, что в конструктивном плане оба эти варианта имеют определенное сходство…
Внутренняя компенсация.
При этом способе носок рулевой поверхности помещается в камеру внутри несущей поверхности (крыла), которая разделена на две части гибкой непроницаемой перегородкой (называемой еще балансировочной панелью), соединенной с носком и с конструкцией крыла. В местах сопряжения рулевой поверхности с несущей оставлены узкие щели, сообщающие внутренние полости с атмосферой.
При отклонении руля на одной из его поверхностей образуется область поддавливания, а на другой область разрежения. Обе эти области через указанные щели сообщаются с внутренними полостями, в результате чего гибкая перегородка прогибается в соответствующую сторону, увлекая за собой всю рулевую поверхность.
Принцип внутренней компенсации.
То есть образуется момент, направленный в сторону, обратную шарнирному моменту управления. Такой тип компенсации используют обычно на элеронах, на скоростных самолетах. Здесь отсутствует выход носка управляющей поверхности в поток, тем самым не увеличивается лобовое сопротивление. Однако возможны конструктивные трудности для осуществления такой компенсации на тонких профилях.
Сервокомпенсация.
На дозвуковых однорежимных самолетах используются так называемые сервокомпенсаторы (от понятия servo-, то есть автоматическое вспомогательное устройство) или флэттнеры (по имени изобретателя, немецкого инженера Антона Флеттнера (Anton Flettner)). Такие компенсаторы представляют из себя небольшую управляющую поверхность, устанавливаемую вдоль задней кромки руля.
Конструктивно все выполнено так, что эта поверхность автоматически отклоняется в сторону, обратную отклонению руля. Создаваемая при этом аэродинамическая сила на плече до оси вращения компенсатора уравновешивает частично или полностью шарнирный момент руля.
Так как это плечо относительно велико, то даже при малой площади поверхности и небольших углах ее отклонения величина момента, который она создает, оказывается достаточной для эффективной компенсации шарнирного момента рулевой поверхности. Но при этом сервокомпенсатор несколько уменьшает эффективность руля, так как «забирает» часть его поверхности для образования компенсационного момента.
Аэродинамические сервокомпенсаторы по принципу их управления подразделяются на два вида.
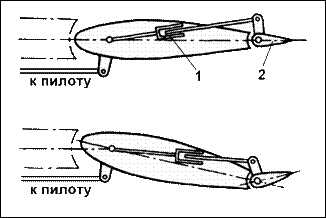
Первый вид — это так называемый кинематический. В нем управление поверхностью компенсатора осуществляется с помощью тяги, связанной с неподвижной частью несущей поверхности. То есть чем больше величина отклонения руля, тем больше отклонение поверхности компенсатора. Летчик при этом не может влиять на процесс из кабины, но в наземных условиях управляющая тяга в общем случае может быть отрегулирована на разные углы отклонения.
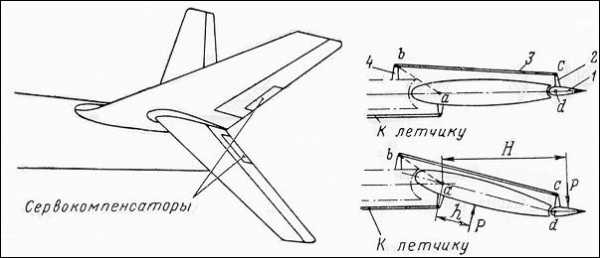
Схема работы кинематического сервокомпенсатора.
Еще одна схема для кинематического сервокомпенсатора. 1 - управляющая тяга, 2 - управляющая поверхность, 3 - компенсатор.
Второй вид — более совершенный — это пружинный сервокомпенсатор. В его конструкции основное звено — двуплечий рычаг, свободно вращающийся на оси вращения рулевой поверхности. Одно плечо этого рычага зажато между пружинами, имеющими определенную затяжку. Второе соединено с главной управляющей тягой и тягой управления поверхностью компенсатора.
Пока нагрузки на рулевую поверхность (шарнирный момент) невелики, то есть не превышают величину затяжки пружин, вся конструкция руля вращается под действием главной управляющей тяги как одно целое и руль отклоняется без отклонения компенсатора.
Пружинный сервокомпенсатор.
Но как только шарнирный момент достигнет какой-то предельной величины, которая больше затяжки одной из пружин, двуплечий рычаг начинает поворачиваться, отклоняя тем самым поверхность компенсатора. То есть весь механизм как бы включается автоматически, снижая тем самым усилия, потребные для отклонения руля управления.
Получается, что сервокомпенсатор такой конструкции можно использовать практически на любом режиме полета, потому что он работает пропорционально усилиям, действующим в системе управления, а не углам отклонения управляющих поверхностей.
Антисервокомпенсатор.
Видимо следует упомянуть и о так называемом антисервокомпенсаторе, хотя функции этого устройства прямо противоположны нашей теме. То есть антисервокомпенсатор не уменьшает шарнирный момент, а наоборот увеличивает его. Сам компенсатор отклоняется в сторону обратную для обычного сервокомпенсатора. По аналогии с «перекомпенсацией» можно сказать, что происходит «недокомпенсация» :-).
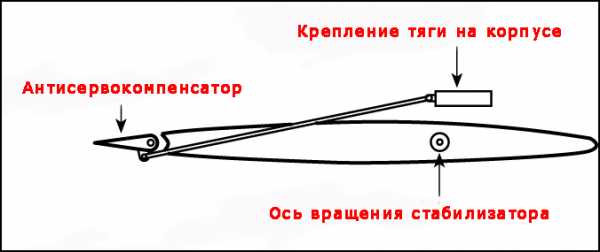
Принцип работы антисервокомпенсатора.
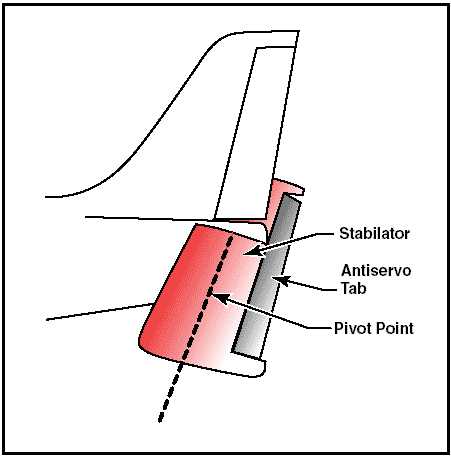
Конструктивное исполнение антисервокомпенсатора.

Антикомпенсатор на стабилизаторе самолета Piper Рa-28-140 Сherokee. Носок стабилизатора вниз - антикомпенсатор вверх.
Применяется это устройство обычно на легкомоторных самолетах, которые не оборудованы отдельным рулем высоты. Его функции выполняет цельноповоротный стабилизатор. Такая конструкция делает легкий самолет достаточно чувствительным в управлении, поэтому антисервокомпенсатор «затяжеляет» управление, то есть как бы улучшает обратную связь от стабилизатора к пилоту с тем, чтобы тот «не переборщил» и не применил чрезмерные перемещения ручки управления.
Триммирование .
Существует еще один способ аэродинамической компенсации шарнирного момента. Но стоит он несколько обособленно от остальных. Дело в том, что все только что описанные компенсаторы работают с маневренными нагрузками (я о них выше говорил), а этот используется для компенсации нагрузок балансировочных (тоже об этом говорилось :-)).
Cпособ носит название триммирование (от trim, что буквально означает «приводить в порядок»). и в общем случае с его помощью балансировочные нагрузки на органах управления в кабине могут быть уменьшены до нуля. В этом случае самолет считается полностью стриммированным.
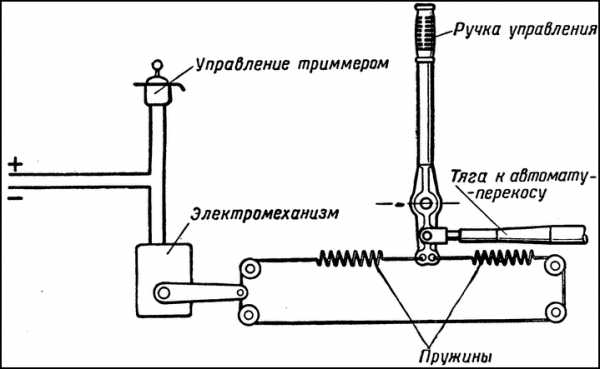
Схема принципа действия триммера.
В традиционных системах триммирования активный элемент конструкции при этом способе — триммер (собственно компенсационная поверхность), а сама конструкция (как и ее аэродинамическое действие) в принципе аналогична конструкции кинематического сервокомпенсатора.
Еще одна схема принципа работы триммера. Здесь 2 - триммер, 1 - электромеханизм управления триммером.
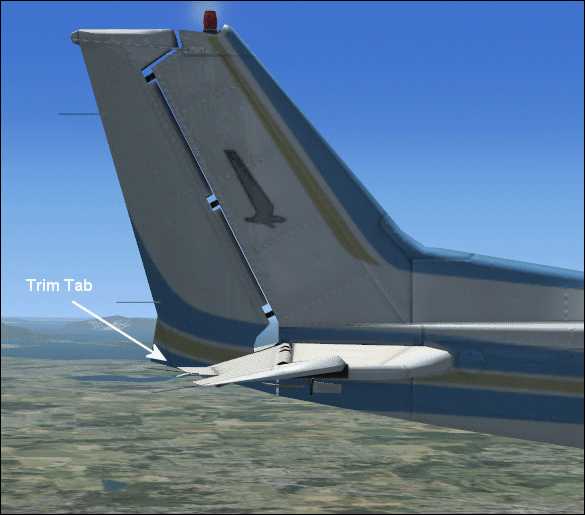
Триммер (trim tab) руля высоты.
Только триммер имеет свою собственную систему управления (обычно механическую или электромеханическую) и может отклоняться летчиком из кабины, который в этом случае по своему желанию выбирает или меняет величину компенсации.
Существуют еще так называемые неуправляемые триммеры. Они могут быть использованы на нескоростных самолетах и устанавливаются обычно на элеронах и рулях направления. Представляют из себя чаще всего отгибаемые вручную пластины и используются при наличии какой-либо аэродинамической несимметричности летательного аппарата.
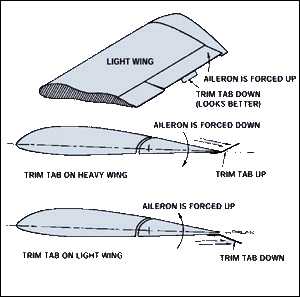
Принцип действия нерегулируемого триммера на элероне самолета.

Нерегулируемый триммер на руле направления самолета L-29.

Неуправляемый триммер на РН учебно-тренировочного самолета.

Нерегулируемый триммер на РН легкомоторного самолета.
Такого же типа пластины устанавливают на лопастях несущего винта вертолетов. Они работают по такому же принципу и служат для устранения так называемой несоконусности лопастей при вращении, то есть, чтобы лопасти не выходили за границы поверхности воображаемого конуса, образуемого лопастями несущего винта при его вращении.
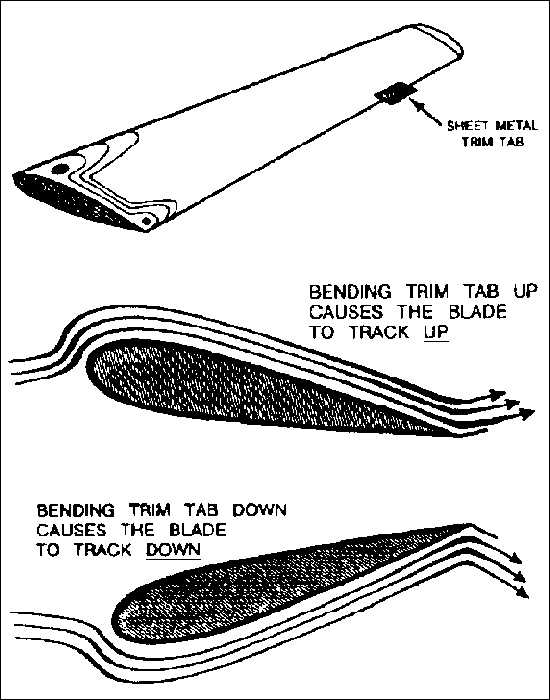
Нерегулируемый триммер на лопасти вертолета.
Такие триммеры так же подгибаются вручную на основании данных специальных датчиков, полученных во время наземных испытаний.
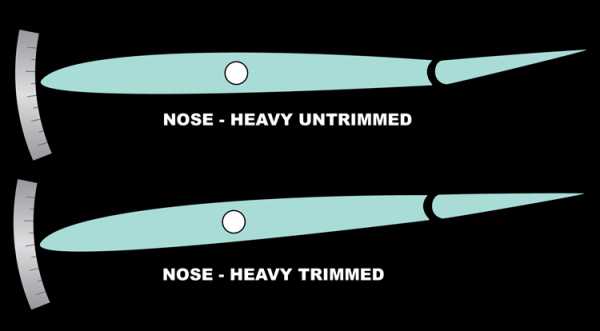
Кроме традиционной конструкции триммера применяется также триммирование с помощью управляемого (или передвижного) стабилизатора, хотя этот способ уже нельзя отнести к аэродинамической компенсации. Угол установки стабилизатора меняется с помощью специального механизма, управляемого летчиком из кабины и не требующего от него никаких усилий.
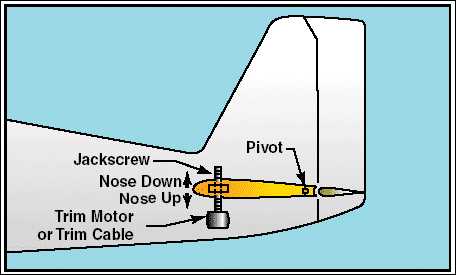
Принцип перестановки стабилизатора.
Взаимное перемещение стабилизатора и руля высоты.
В процессе перекладки стабилизатора угол наклона руля высоты также плавно меняется, чтобы сохранить балансировку самолета. Все это продолжается до тех пор, пока аэродинамическая сила, вновь появившаяся на стабилизаторе не станет равна силе на руле высоты, которая была там до начала перекладки. При этом усилие на ручке управления в кабине становится близким к нулю.
Другие системы.
В общем случае применение управляемого стабилизатора позволяет уменьшить размеры руля высоты и, соответственно, потребные усилия для его перемещения. Этот способ достаточно эффективен в большом диапазоне центровок и скоростей, при этом стабилизатор имеет меньшее лобовое сопротивление, нежели с традиционным триммером.
Однако, сама система перекладки стабилизатора по сравнению с обычным триммированием имеет больший вес. Кроме того существует необходимость четкого выполнения правил и параметров установки стабилизатора перед взлетом в соответствии с центровкой летательного аппарата. Несоблюдение этих правил чревато тяжелыми летными происшествиями.

Регулируемый стабилизатор самолета Embraer ERJ-190.
Кроме регулируемого стабилизатора существуют и другие системы, в которых уменьшение воспринимаемых нагрузок осуществляется за счет уменьшения площади управляющих поверхностей, но при этом без снижения эффективности самих систем управления в целом.
В первую очередь это так называемый серворуль. В такой конструкции главная управляющая поверхность, то есть собственно руль свободно подвешен на своем шарнире и не связан с системой управления, которую контролирует пилот. Но на его конце так же шарнирно подвешена в несколько раз меньшая по площади аэродинамическая поверхность (внешне похожая на триммер), которая носит название серворуль и которая как раз и управляется летчиком из кабины.
Схема действия серворуля.
Отклоняется серворуль в сторону, обратную необходимому отклонению главного руля. Возникающая при этом на нем сила заставляет свободно подвешенный основной руль отклоняться в нужном направлении. Это отклонение будет происходить до тех пор, пока момент от силы на серворуле не уравновесит шарнирный момент (тот самый вредный, который нужно уменьшить) на главном руле.
Такое равновесие возможно из-за большой разницы плеч сил действующих на руле и серворуле. При этом летчик на ручке управления ощущает только усилия на серворуле, то есть совсем небольшие, потому что сам серворуль имеет небольшую площадь.
Основные недостатки систем управления с серворулем — это некоторое запаздывание в отклонении основного руля и относительное ухудшение его работы на малых скоростях.
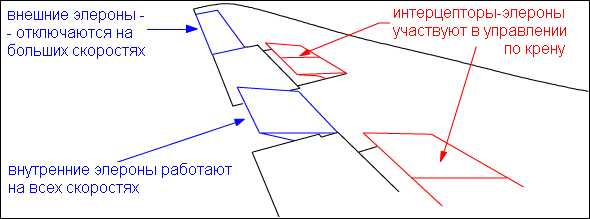
Совместное использование элеронов и элерон-интерцепторов для поперечного управления.
Еще один пример использования того же принципа. Это применение элерон-интерцепторов в канале поперечного управления. Сами эти органы управления приводятся в действие отдельной системой и не влияют на усилие на ручке управления самолетом. Но их параллельное с элеронами применение кроме ряда других положительных моментов ( тема для другой статьи:-)) позволяет уменьшить площадь элеронов, а значит и величину шарнирного момента на них.
Использование бустеров в системе управления.
Способов компенсации шарнирного момента, как видите, хватает. Однако, как уже говорилось ранее, величина его с ростом размеров летательного аппарата и скорости его полета растет. Рано или поздно может наступить такой момент, когда ни один из существующих приемов компенсации уже не будет эффективен (особенно это касается маневренных нагрузок).
Чтобы это избежать и увеличить возможности пилотирования человеком летательного аппарата на различных режимах на многих современных скоростных (или крупноразмерных) самолетах в каналах управления используют гидроусиление, суть которого в том, что летчик, перемещая ручку управления, воздействует только на перемещение маленького золотника (сервоклапана), то есть специального управляющего элемента в системе автоматики управления.
А уже этот золотник формирует и оказывает управляющее воздействие на большой гидроцилиндр (бустер), который связан непосредственно с самолетными рулями.
Однако, если говорить точнее, то по характеру воздействия на этот сервоклапан системы гидроусиления делятся на два вида.
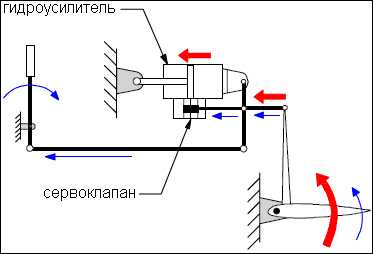
Схема гидросистемы усиления обратимого типа.
Первый — это так называемые системы обратимого типа. Особенность принципа их работы (кстати, такого же как в автомобильных системах усиления руля) заключается в том, что для приведения в действие всей системы (начиная с золотника-сервоклапана) необходимо приложить некоторое небольшое первоначальное усилие, которое сдвигает управляющую поверхность вместе с сервоклапаном. В дальнейшем уже в работу по полной в ступают гидроусилители (бустеры) и пилот использует управление в полном объеме.
Положительной стороной такой системы является тот факт, что пилот при ее использовании чувствует на ручке и педалях все те же маневренные нагрузки в виде шарнирного момента. Не в полном объеме, конечно, но этого достаточно для правильного пилотирования. А недостаток ее в том, что при больших скоростях/размерах самолета нагрузки могут возрасти настолько, что пилот уже не сможет сделать первоначальный сдвиг для введения системы в действие.
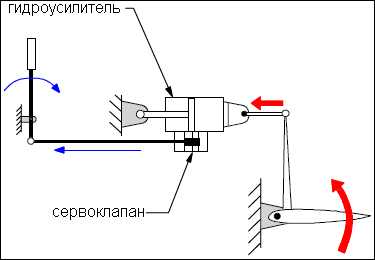
Схема гидросистемы усиления необратимого типа.
Вот для таких самолетов и режимов полета существует второй вид гидросистем усиления — системы необратимого типа. При использовании таких систем полностью отсутствует обратное воздействие полетных нагрузок на ручку управления, и летчик не ощущает даже малой части тех нагрузок, которые воспринимает на себя рулевая поверхность. Все эти нагрузки полностью замыкаются на гидроусилитель.
Но, как уже упоминалось ранее, летчика нельзя полностью лишить ощущений, свойственных всему процессу управления. Ведь при помощи этих ощущений он «чувствует» самолет, и без них этого самого управления просто не будет.
Поэтому на самолетах, использующих в системах управления гидроусилители необратимого типа, применяют специальные устройства, включенные в линию проводки управления, которые имитируют полетные усилия на ручке управления и педалях. Это различные механизмы (пружинные) и гидромеханизмы загрузки, автоматы регулирования загрузки.
Автоматы регулирования используют данные о скоростном напоре, полученные от датчиков полного и статического давления воздуха, создавая тем самым реальную картину, соответствующую ручному управлению.
Совместно с механизмами загрузки работают и механизмы триммерного эффекта, так же имитирующие работу триммеров, как при полностью ручном управлении.
Механизм триммерного эффекта вертолета.
Механизмы триммерного эффекта в этом случае имеют принципиальное сходство с устройством триммирования на вертолете. Так как конструктивно выполнить на вертолете триммеры подобно самолетным не представляется возможным, то разгрузка ручки управления вертолета в простейшем случае выполняется с использованием электромеханического пружинного разгрузочного устройства.
==========================
На этом, пожалуй, и все. Таковы в общем и целом способы и технические решения для ограничения или же устранения эффекта шарнирного момента в системе управления летательным аппаратом. Все они применяются в той или иной степени. Какие-то часто, какие-то значительно реже, в зависимости от предназначения и конструкции самолета и вертолета.
Однако вся техника, как и и системы управления, достаточно быстро совершенствуется. Уже сейчас просматривается тенденция превращения летчика (в особенности на современных лайнерах последнего поколения) из лица активно пилотирующего в лицо пассивно контролирующее :-), за которое думает компьютер, а пилотирование осуществляют подчиняющиеся ему устройства и системы автоматики, в которых в том числе и процесс триммирования выполняется автоматически.
Если так пойдет дальше, то рано или поздно настанет момент, когда все вышеописанные технические ухищрения окажутся ненужными….
Может быть… Не исключено…Но, видимо не сейчас… Не в ближайшем будущем :-)….
В заключение некоторые характерные фотографии по теме, которые в текст впихивать не стал 🙂 …
До новых встреч.

Самолет Vought F4U Corsair.

Хвостовое оперение самолета Vought F4U Corsair. Видны сервокомпенсаторы руля направления и руля высоты (внешний), триммер руля высоты (внутренний). Компенсация рулей осевая (определенное конструктивное сходство с роговой).

Работа сервокомпенсаторов РН и РВ самолета Vought F4U Corsair.

Колесо механического управления триммером руля высоты самолета Cessna-172.

Кабина самолета Boeing 737 Classic. Колеса (штурвалы) управления перестановкой стабилизатора на среднем пульте.

Кабина Airbus 320-214. Хорошо видны органы управления триммированием по тангажу (колеса с белыми метками).
Постоянно горит значок руля на панели Шкоды — что это и как исправить |
Делал диагносту ещё раз но выбирал из списка авто ошибок не нашло
Wednesday,20,January,2016,19:07:52:10463ВАСЯ — программа для диагностики автомобилей концерна VAG запущена на Windows 10 x64
ВАСЯ Версия: 15.7.2.0
Версия данных: 20151216
программа для диагностики автомобилей концерна VAG запущена на Windows 10 x64
Пробег: 43110km-26787mi Номер заказ-наряда:
Шасси: 1Z (1U — Skoda Octavia (1997 > 2011))
Список: 01 02 03 08 15 16 17 19 22 29 35 36 37 39 46 56 76
VIN: XW8CA41ZXBK257497 Пробег: 43110km-26787miles
——————————————————————————-
Адрес 01: Электроника двигателя Label: 06A-906-033-BGU.clb
Part No: 06A 906 033 KB
Компонент: BSE S71 1.6 2V 2228
Ревизия: —H04— Серийный номер:
Кодировка: 0004071
Мастерская #: WSC 01530 935 00200
VCID: 69D241BD40513D76DC-803C
Неисправности не найдены.
Готовность: 0110 1101
——————————————————————————-
Адрес 03: Электроника тормозной системы Label: 1K0-907-379-MK70M.clb
Part No SW: 1K0 907 379 AK HW: 1K0 907 379 AK
Компонент: MK70 M MASR 0105
Ревизия: 00h45001
Кодировка: 0017665
Мастерская #: WSC 01530 935 00200
VCID: 7BFE0BF53ACDBFE63E-802E
Неисправности не найдены.
——————————————————————————-
Адрес 08: Электроника кондиционера / отопителя (J301) Label: 3C8-907-336.clb
Part No SW: 3T0 820 047 T HW: 3T0 820 047 T
Компонент: AC Manuell h26 0401
Ревизия: 00007001
Кодировка: 0000000002
Мастерская #: WSC 01530 935 00200
ASAM Dataset: EV_ACManueBHBVW36X A01010
ROD: EV_ACManueBHBVW36X_SK35.rod
VCID: 4084BC19DBAB1C3E2B-8014
Неисправности не найдены.
——————————————————————————-
Адрес 15: Подушки безопасности Label: 6Q0-909-605-VW52.clb
Part No SW: 6Q0 909 605 AH HW: 6Q0 909 605 AH
Компонент: R3 AIRBAG VW52 025 2400
Ревизия: 06025000 Серийный номер: 0037TR08RKH9
Кодировка: 0021043
Мастерская #: WSC 04056 056 00200
VCID: 7DFA05ED24D9B1D600-8028
Неисправности не найдены.
——————————————————————————-
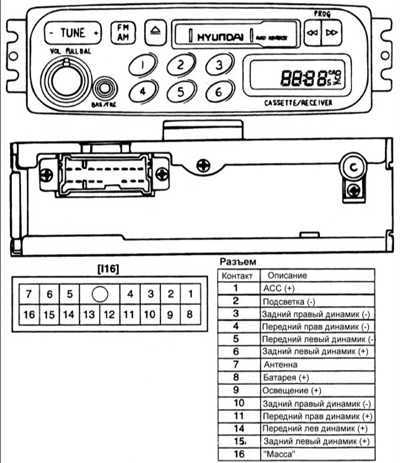
Адрес 16: Электроника рулевой колонки (J527) Label: 5K0-953-569.clb
Part No SW: 1K5 953 521 AE HW: 5K0 953 569
Компонент: LENKS.MODUL 009 0136
Ревизия: FF010039 Серийный номер: 20101128300062
Кодировка: 4080040000
Мастерская #: WSC 01530 935 00200
ASAM Dataset: EV_SMLSNGVOLWS A01004
ROD: EV_SMLSNGVOLWS.rod
VCID: 70E42CD9AB8BCCBE9B-8024
Неисправности не найдены.
——————————————————————————-
Адрес 17: Комбинация приборов (J285) Label: 5K0-920-xxx-17.clb
Part No SW: 1Z0 920 803 K HW: 1Z0 920 803 K
Компонент: KOMBI H05 0405
Серийный номер: 00000000000000
Кодировка: 110900
Мастерская #: WSC 01530 935 00200
ASAM Dataset: EV_Kombi_UDS_VDD_RM09 A04089
ROD: EV_Kombi_UDS_VDD_RM09_SK35.rod
VCID: 3C7CC8E9B74378DE77-8068
Неисправности не найдены.
——————————————————————————-
Адрес 19: Диагностический интерфейс шин данных (J533) Label: 7N0-907-530-V2.clb
Part No SW: 7N0 907 530 C HW: 1K0 907 951
Компонент: J533 Gateway h47 0614
Ревизия: h47 Серийный номер: 311010F1000631
Кодировка: 351302
Мастерская #: WSC 66893 392 00200
VCID: 3064ECD9630B8CBEDB-8064
Неисправности не найдены.
——————————————————————————-
Адрес 56: Магнитола (J503) Label: 5M0-035-1xx-56.clb
Part No SW: 1Z0 035 161 F HW: 1Z0 035 161 F
Компонент: SWING 009 0065
Ревизия: 0I001001 Серийный номер: SKZ1Z2K8413992
Кодировка: 000004000001
Мастерская #: WSC 66893 392 00200
VCID: 3162E9DD680185B6D4-8064
Неисправности не найдены.
Конец————————(Elapsed Time: 03:31)————————-
А руль се ровно горит постоянно оранжевым цветом что же ему не хватает …А вот авто определение находит ошибки…
Monday,18,January,2016,18:28:15:10463
ВАСЯ — программа для диагностики автомобилей концерна VAG запущена на Windows ??? x64
ВАСЯ Версия: 15.7.1.0
Версия данных: 20150910
программа для диагностики автомобилей концерна VAG запущена на Windows ??? x64
———————————————————————————
———————————————————————————
Адрес 44: Усилитель руля Label: 1Kx-909-14x-44.clb
Номер блока управления: 1K0 909 144 J
Компонент и/или версия: EPS_ZFLS Kl. 67 3001
Кодировка:
Код мастерской: WSC 01324 785 00200
VCID: 3162E9DDA80185B6E2-8064
3 Найдены неисправности:
03803 — Датчик угла поворота рулевого колеса усилителя рул. упр.
005 — Нет или неверная основная установка/адаптация — Индикатор неисправности ВКЛ
Стоп-кадр:
Статус неисправности: 11100101
Приоритет неисправности: 2
Частота появления ошибки: 1
Индекс забывания: 255
Пробег: 43118 km
Отсчет времени: 0
Дата: 2053.14.16
Время: 18:25:08
Стоп-кадр:
АКБ вольт: 11.9 V
DD
Температура: 2.0°C
Счет: 3
Уг.поворота: 0.00°
Счет: 0
Уг.пов.не ини
02797 — Блок управления ассистента движения по полосе(J759)
004 — Нет сигнала/связи
Стоп-кадр:
Статус неисправности: 01100100
Приоритет неисправности: 3
Частота появления ошибки: 1
Индекс забывания: 98
Пробег: 43118 km
Отсчет времени: 0
Дата: 2053.14.16
Время: 18:25:08
Стоп-кадр:
Напряжение: 11.88 V
DD
Температура: 2.0°C
Об/мин: 0 /min
Скорость: 0.0 km/h
Скорость: 0.0 km/h
Счет: 0
03075 — Блок управления автоматического парковочного ассистента(J791)
004 — Нет сигнала/связи
Стоп-кадр:
Статус неисправности: 01100100
Приоритет неисправности: 3
Частота появления ошибки: 1
Индекс забывания: 98
Пробег: 43118 km
Отсчет времени: 0
Дата: 2053.14.16
Время: 18:25:08
Стоп-кадр:
Напряжение: 11.88 V
DD
Температура: 2.0°C
Об/мин: 0 /min
Скорость: 0.0 km/h
Скорость: 0.0 km/h
Счет: 0
В чем разница между гидроусилителем (ГУР) или электроусилителем (ЭУР) руля?
Автопроизводители делают всё, чтобы езда на автомобиле доставляла комфорт и удовольствие. Это касается буквально всего в машине, в том числе и рулевого управления. Руль должен поворачиваться легко, без усилий, а не с трудом, как это было в прежние времена на старых транспортных средствах.
В настоящее время сложно себе представить автомобиль без усилителя руля, то есть специального устройства, который помогает поворачивать колёса машины. Многие знают, что такие усилители бывают двух видов: гидравлические, то есть приводимые в действие гидравликой (ГУР), и электрические, работающие с помощью электродвижка (ЭУР). Давайте разберемся в чем разница между гидроусилителем или электроусилителем руля?
Принцип работы ГУР
Гидравлические усилители вращения рулевой колонки появились ещё в прошлом веке и поначалу устанавливались только на грузовики. Это понятно. Управлять многотонной машиной гораздо сложнее, чем легковой. Однако, автопроизводители со временем стали применять ГУР в том числе на легковых машинах, тем самым повышая их привлекательность по сравнению с другими марками. На данный момент гидравликой оснащается примерно 60% новых машин.
Гидроусилитель руля — это достаточно сложный механизм, состоящий из нескольких элементов:
— насос, связанный ременной передачей с коленчатым валом двигателя;
— бачок для гидравлической жидкости;
— поршень, установленный в рулевой рейке;
— гидро-распределитель, задающий направление движения поршню.
Все эти элементы соединяются между собой металлическими трубками, в которых находится гидравлическая жидкость. Её задача – передавать давление, создаваемое насосом, поршню, который затем толкает вал рейки и таким способом помогает поворачивать колеса машины. В целом ГУР работает следующим образом.
После того, как запускается двигателя автомобиля, насос, вращаемый коленвалом, накачивает давление в системе. Пока водитель не поворачивает руль, излишек давления сбрасывается в расширительный бачок. При попытке повернуть баранку автомобиля распределитель открывает нужную магистраль и направляет жидкость в одну из камер, находящуюся с правой или левой стороны от поршня.
Под давлением поршень перемещается и толкает вал рулевой рейки одновременно с тягой, присоединенной к поворотному кулаку переднего колеса. Таким образом существенно уменьшается величина усилия, которая необходима водителю для поворота руля.
Если руль машины повернуть в другую сторону, распределитель перекроет первую магистраль и откроет вторую, давление возникнет в другой камере и поршень двинется в обратном направлении.
Принцип работы ЭУР
Электроусилители руля были внедрены позже, чем гидравлические, и стали массово применяться только после 2000 года, постепенно завоевывая автомобильный рынок мира.
Оба этих механизма выполняют одну и ту же функцию — облегчают автовладельцу рулевое управление автомобилем. Однако разница между ними заключается в том, что ЭУР перемещает вал рейки с помощью специального электродвигателя, а ГУР с помощью насоса и гидравлической жидкости.
При этом движок в электрическом усилителе руля управляется отдельным электронным блоком (ЭБУ). Принцип работы следующий:
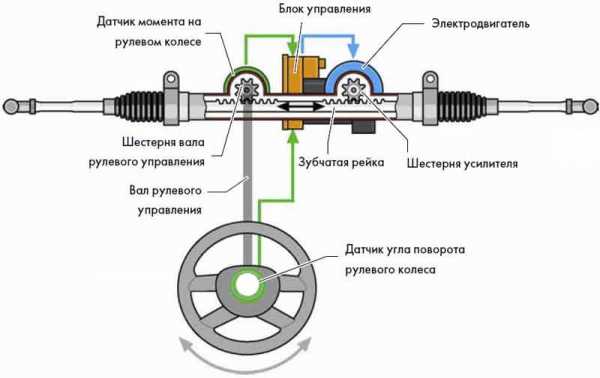
После запуска двигателя на блок управления подаётся напряжение, но ЭУР в это время ещё не действует. После малейшего поворота руля, это движение улавливает специальный датчик, который передаёт импульс ЭБУ. По сигналу датчика контроллер даёт команду электродвигателю вращать рулевой вал в ту или иную сторону посредством шестеренчатой передачи.
Плюсы и минусы гидроусилителя руля
ГУР имеет ряд достоинств, благодаря которым он в своё время получил широкое распространение на автомобильном рынке. Вот самые главные:
— более низкая себестоимость производства, которая в свою очередь влияет на конечную цену нового автомобиля;
— благодаря использованию ГУР можно получить большую мощность, которая необходима при эксплуатации тяжелых грузовиков и микроавтобусов;
— надёжная конструкция гидроусилителя, которая проверена годами применения.
Тем не менее ГУР обладает и недостатками. Основной из них — это необходимость контроля уровня жидкости в системе и периодичность обслуживания. Нужно следить, чтобы не протекали сальники поршневого механизма, распределителя и насоса, вовремя менять и подтягивать ремень, смазывать подшипники.
Среди других минусов, которые менее существенны, это небольшое увеличение расхода топлива за счёт того, что насос гидроусилителя работает постоянно, пока включен двигатель.
Достоинства и недостатки электроусилителя руля
В сравнении с ГУР электрический усилитель имеет ряд преимуществ:
— такая система, включающая электродвигатель и блок управления с датчиком, не нуждаются в регулярных осмотрах и обслуживании;
— меньшие габариты механизма, то есть не занимает много места;
— ЭУР не потребляет электроэнергию без необходимости и, выходит, не расходует дополнительное топливо.
Электроусилитель руля также имеет и другие достоинства, например, касающиеся изменения настроек его работы в зависимости от условий езды. Кроме того, ЭУР используется в современных автомобилях премиум-класса, потому что может управляться бортовым компьютером.
Главный недостаток электрического усилителя — это его высокая цена. Чем больше стоимость механизма и его элементов, тем дороже обойдется ремонт. Часто вышедший из строя ЭУР приходится полностью менять. Кроме того, электрический усилитель имеет меньшую мощность, а это осложняет его использование для грузовиков и тяжелых транспортных средств.
Какой усилитель руля лучше?
Опыт показывает, что оба усилителя достаточно надёжны в эксплуатации. Хотя поломки происходят и с тем, и с другим. При выборе между ГУР или ЭУР необходимо рассматривать каждую ситуацию отдельно: какой автомобиль, каким бюджетом обладает водитель и тд. Решать вам, а характеристики каждого приведены выше.
Стоит только отметить, что электроусилители руля постоянно совершенствуются и вытесняют гидравлику с рынка благодаря более современной и простой конструкции. Возможно со временем их стоимость будет снижена, а мощность возрастет.
Для чего нужен и как работает усилитель тормозов?
Усилитель тормозов является важным компонентом гидравлических тормозных систем. Незаметное устройство, расположенное в моторном отсеке, позволяет использовать всю мощность тормозов, установленных в нашем автомобиле. Объясняем принцип работы усилителя тормозов.
Насколько важен этот элемент в автомобиле, мог убедиться любой, кто садился за руль буксируемого автомобиля с неработающим двигателем или пытался затормозить машину, у которой заглох двигатель.Тогда даже незначительное снижение скорости требует гораздо большего, чем обычно, нажатия на педаль тормоза, которая после двух-трех нажатий становится чрезвычайно жесткой, а ход ее чрезвычайно коротким. Это потому, что при выключенном двигателе указанный сервопривод не работает. Как полностью механическое устройство, он предназначен для помощи водителю в создании достаточно высокого давления в тормозной системе во время торможения. Другими словами, сервопривод берет на себя часть работы, необходимой для торможения автомобиля.
Усилитель тормозов имеет форму диска или барабана и расположен рядом с перегородкой моторного отсека со стороны рулевого колеса, за бачком тормозной жидкости, к которому он подключен. Он работает за счет увеличения силы, действующей на поршень главного тормозного цилиндра, когда водитель нажимает на педаль тормоза. Для этого усиления он использует отрицательное давление, присутствующее во впускном коллекторе, которое создается в результате всасывания воздуха поршнями. В дизеле из-за отсутствия дросселя, дросселирующего подачу воздуха в коллектор, разрежение создается вакуумным насосом.
Смотрите галерею: девушки из мото
Как работает усилитель тормозов?
Проще говоря, его работа начинается, как только нажимается педаль тормоза. Это давление оказывает давление на главный цилиндр, одновременно открывая клапан, который позволяет отрицательному давлению из коллектора воздействовать на диафрагму внутри сервопривода. Разность давлений между одной стороной (отрицательное давление) и другой стороной (атмосферное давление) диафрагмы создает силу, которая затем передается от диафрагмы к поршню насоса.Благодаря клапану сила, действующая на диафрагму, прямо пропорциональна давлению на педаль тормоза, поэтому водитель может регулировать усилие торможения. В противном случае даже плавное нажатие на тормоз приведет к почти максимальной мощности торможения.
См. также: Почему педаль тормоза прилипает к полу?
Усилитель тормозов не требует технического обслуживания, это не аварийное устройство. Возможные неисправности, чаще всего проявляющиеся утечками тормозной жидкости или чрезмерно жесткой педалью тормоза, к сожалению, требуют замены всего элемента.
Если вы хотите узнать больше, загляните »
Код водителя. Изменения в 2022 году. Мандаты. Штрафные очки. Дорожные знаки
.№ 1 СЕРВОМЕХАНИЗМЫ - конструкция и эксплуатация
Вместе с iAutomatyka.pl мы разработали серию статей и видеороликов, посвященных сервомеханизмам. Это может показаться сложным вопросом, но вы обнаружите, что доступные решения делают большую часть работы за нас. Для начала важно понять несколько основных концепций, и именно с них мы и начнем. Далее мы покажем, как устроена и подключена система управления, а затем перейдем к программированию и объяснению используемых на практике функций.Что такое сервопривод и как он работает? Приглашаем вас прочитать наш текст!
Курс автоматизации
1: Сервомеханизмы Mitsubishi 1/3 Конструкция и принцип работы
2: Сервомеханизмы Mitsubishi 2/3: Подключение и программирование
3: Сервомеханизмы Mitsubishi 3/3: Практические функции
АВТОМАТИЧЕСКИЙ КУРС - ФИЛЬМ
Сервомеханизм - для чего и зачем?

Термин «сервопривод» используется, когда объекты транспортируются к месту назначения или следуют за движущимся объектом.Сервопривод — это система управления, которая управляет машиной в соответствии с данными командами. Сервопривод обеспечивает настройку, управление скоростью и крутящим моментом.
Рассмотрим применение сервосистем и инверторов.
Система классических электродвигателей в тандеме с преобразователем частоты (он же инвертор) может показаться понятной. Преобразователь частоты преобразует частоту электрического напряжения, благодаря чему у нас есть возможность плавной регулировки оборотов двигателя. Это контроль скорости. Систему с инвертором можно использовать, например, для вентиляции, насоса (поддерживающего заданное давление или уровень), конвейера или мешалки. В этих случаях нет необходимости получать конкретное положение двигателя, поскольку важна только плавная регулировка скорости.
Сервосистемыи в основном используются для управления положением, , а также для управления скоростью и крутящим моментом.
 Контроль положения: Сервоприводы точно перемещают объекты или останавливают их в выбранном месте, они также могут позиционировать объекты с микрометровой точностью (мкм = 1/1000 мм) и многократно перемещать/останавливать объекты.
Контроль положения: Сервоприводы точно перемещают объекты или останавливают их в выбранном месте, они также могут позиционировать объекты с микрометровой точностью (мкм = 1/1000 мм) и многократно перемещать/останавливать объекты.
Управление скоростью: Сервоприводы точно реагируют на целевую скорость даже при ее быстром изменении, а также могут минимизировать разницу между текущей скоростью и целевой скоростью при изменении нагрузки. Непрерывная работа возможна в широком диапазоне скоростей.
Управление крутящим моментом: Сервоприводы точно контролируют крутящий момент даже при изменении нагрузки. (Крутящий момент — это сила, вызывающая вращение.)
Благодаря своей точности и функциональности применение сервоприводов очень широкое.Даже в повседневной жизни их более простые системы можно найти на DVD-дисках, жестких дисках компьютеров или в качестве устройства подачи бумаги в фотокопировальном аппарате. Однако в промышленности эти системы более совершенны. Прежде чем объяснять это более подробно, вот несколько примеров применения сервоприводов:
Примеры сервоприводов:
- Транспортный контроль, автоматизированные системы комплектации заказов.
- Упаковочные машины.
- Этикетировщики.
- Разливочные машины. Станки с ЧПУ
- .
- Промышленные роботы.
- Намоточные машины.
Сервомеханизмы применяются там, где требуется остановка механизма в точно заданном положении с синхронизацией с другими элементами машины, с частым повторением выполняемых действий и реакцией на изменение скорости, нагрузки и других условий работы.
Как работает сервопривод?
Мы объясним, что необходимо для вращения серводвигателя и как он работает, и надеемся сделать это понятным способом.Так что по очереди.
Разделим сервопривод на три секции:
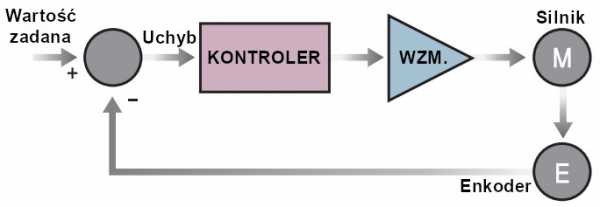
Командная секция - что-то должно "сказать", сколько оборотов двигатель должен вращать и с какой скоростью. Таким образом, секция команд отвечает за отправку управляющих сигналов. Это будет контроллер ПЛК (например, Mitsubishi FX5U-32M) в тандеме с модулем позиционирования (например, Simple Motion FX5-40SSC-S)
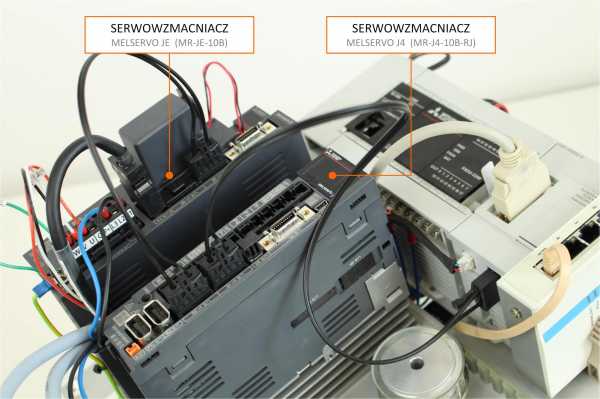
Секция контроллера - Эта секция обрабатывает команды и перемещает двигатель.Он также получает обратную связь о положении двигателя (от энкодера). Секция привода состоит из сервоусилителей (например, Mitsubishi Melservo J4)
Секция привода и обнаружения - эта секция управляет управляемой машиной и считывает ее состояние. Этот раздел состоит из серводвигателей, энкодеров и механических систем.
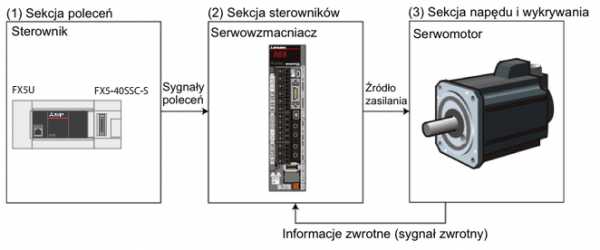
Командный сигнал от модуля позиционирования отправляется на сервоусилитель. Сервоусилитель подает на серводвигатель необходимую мощность для работы в соответствии с переданным командным сигналом.Энкодер, который обычно встроен в серводвигатель, считывает значение вращения серводвигателя и отправляет его обратно в качестве сигнала обратной связи на сервоусилитель. Сервоусилитель проверяет разницу между сигналом команды и сигналом обратной связи и предполагает, что серводвигатель работает должным образом, если разница равна нулю.
Роль модуля позиционирования и сервопривода
Для перемещения серводвигателя модуль позиционирования формирует и отправляет на сервопривод сигнал в виде импульсного сигнала (командные импульсы).Один оборот серводвигателя следует за определенным количеством импульсов. Количество командных импульсов в единицу времени называется частотой командных импульсов и используется для изменения скорости серводвигателя.
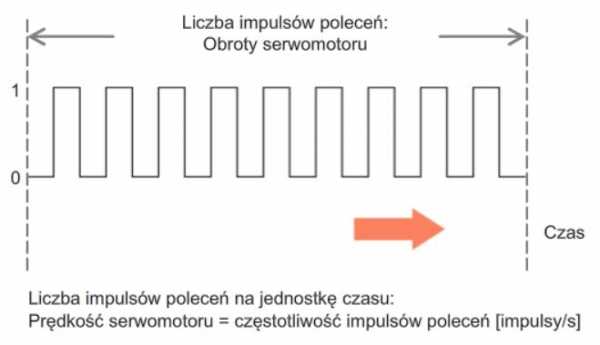 Еще проще: при программировании сервопривода вы, среди прочего, указываете количество импульсов на полный оборот. Затем управляем скоростью вращения серводвигателя путем изменения частоты импульсов. Чем больше импульсов отправляется вовремя, тем быстрее вращается сервопривод.
Еще проще: при программировании сервопривода вы, среди прочего, указываете количество импульсов на полный оборот. Затем управляем скоростью вращения серводвигателя путем изменения частоты импульсов. Чем больше импульсов отправляется вовремя, тем быстрее вращается сервопривод.
См. презентацию ниже для конвейерной ленты с серводвигателем. Он делает один оборот каждые 30 импульсов. Один импульс поворачивает серводвигатель на 12 градусов, и объект на конвейере перемещается в заданное положение. Количество нажатий кнопки (значение на счетчике) равно количеству командных импульсов, а интервалы между нажатиями кнопки - частоте импульсов.
Роль серводвигателя
Серводвигатель движется в зависимости от мощности, получаемой от сервоусилителя.Серводвигатель снабжен датчиком (энкодером), на основании которого, в том числе, точно измеряется скорость вращения двигателя. При фактическом позиционировании механизм может не работать в соответствии с инструкциями из-за характеристик машины и помех (например, силы инерции). Чтобы избежать этой проблемы, следует использовать обратную связь энкодера. Основываясь на сигнале обратной связи от энкодера, сервоусилитель «знает», какую коррекцию он должен внести в систему управления, чтобы получить или сохранить заданное положение.
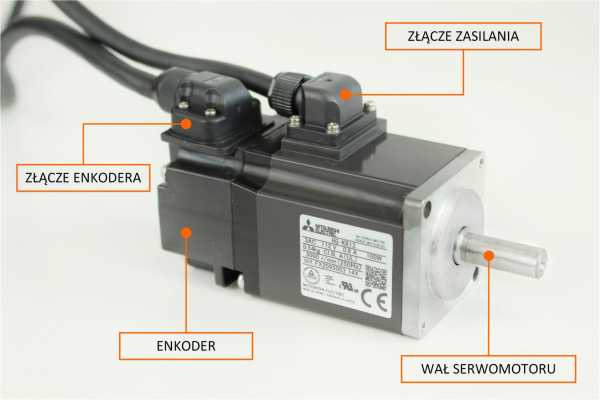
Энкодер
В серводвигателях используются абсолютные энкодеры, которые не требуют перезапуска после отключения питания. Абсолютные энкодеры оснащены детектором положения, определяющим положение во время вращения, и многооборотным детектором, измеряющим количество оборотов. Данные детектора защищены дополнительной батареей, чтобы избежать потери данных при отключении электроэнергии. Следующее видео, хоть и на английском языке, хорошо объясняет принцип работы простого 4-битного энкодера.
В целом, оптические энкодеры используются, когда требуется высокое разрешение и компактный дизайн. Однако магнитные энкодеры можно использовать, если требуется особая устойчивость к внешним факторам (высокая устойчивость к загрязнениям и т. д.). Некоторые энкодеры достигают высокого разрешения (4 миллиона импульсов/об), что улучшает определение положения.
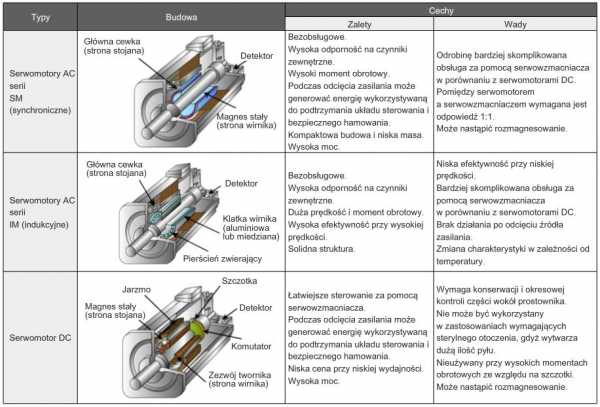
Доступны три типа серводвигателей: серводвигатели переменного тока серии SM (синхронные), серводвигатели переменного тока серии IM (индуктивные) и серводвигатели постоянного тока.Для систем FA серводвигатели переменного тока серии SM в основном используются для малой или средней мощности.
Роль сервоусилителя
Сервоусилитель управляет серводвигателем в соответствии с управляющим сигналом от модуля позиционирования. На основе сигналов обратной связи от энкодера сервоусилитель контролирует правильную работу серводвигателя и исправляет любые ошибки. Помимо цепи управления, сервоприводы имеют также главную (силовую) цепь, которая конструктивно очень похожа на преобразователь частоты (обычно инвертор).
Основное различие между преобразователем частоты и сервоусилителем заключается в том, что сервоусилитель использует динамический тормоз , который поглощает энергию инерции, создаваемую серводвигателем. Это позволяет серводвигателю эффективно тормозить и удерживать его в желаемом положении. В дополнение к управлению и питанию серводвигателя сервоусилитель выполняет множество диагностических функций, связанных с мощностью, скоростью, положением и крутящим моментом. На основе комплексных измерений сервоусилители способны реагировать на нежелательные состояния, например, при возникновении перегрузки работа останавливается и на дисплее появляется сообщение.
Серводвигатель наиболее эффективен при работе на номинальной скорости. Однако максимальная частота командных импульсов, отправляемых модулем позиционирования, ограничена, поэтому, если это значение слишком низкое, посылается недостаточно импульсов для достижения номинальной скорости. Для решения этой проблемы используется электронный редуктор , который увеличивает частоту импульсов внутри сервоусилителя.
Рассмотрим пример, чтобы понять суть электронной трансмиссии.У нас есть следующие свойства:
Разрешение энкодера: 262144 импульсов/оборот
Номинальная скорость : 3000 об/мин
Максимальная скорость: 6000 об/мин
Таким образом, без редуктора (x) максимальная скорость серводвигателя составляет: 1 000 000 * 1/262144 * 60 = 229 об/мин
1x (без редуктора) = 229 об./ мин
2x = 458 об/мин
10x = 2290 об/мин
20x = 4580 об/мин - номинальная скорость и полная производительность с этой конфигурацией достижимы только при установке передачи примерно на 20x для преобразования команд частоты импульсов для соответствующей скорости двигателя.
Сервопривод и счетчик отклонений
Импульсы от командного модуля отправляются на сервоусилитель и регистрируются счетчиком отклонений. Серводвигатель вращается, посылая импульсы обратной связи от энкодера к сервоусилителю.
Счетчик отклонений вычитает импульсы обратной связи от энкодера из командных импульсов от модуля позиционирования. Импульсы, подсчитанные счетчиком дисперсии, называются импульсами ошибки. Счетчик отклонения отправляет команду скорости пропорционально значению импульсов ошибки на усилитель скорости. Когда количество импульсов ошибки велико, скорость серводвигателя увеличивается, чтобы исправить положение двигателя быстрее. По мере уменьшения числа скорость также уменьшается, а когда значение равно нулю, серводвигатель останавливается.
Теперь добавим к целому силовую цепь. Взгляните на рисунок ниже.
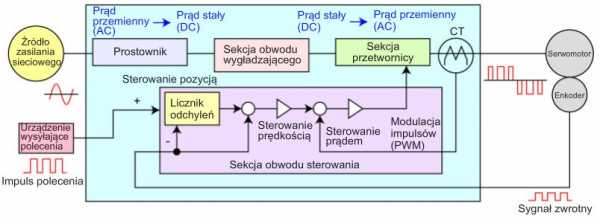
Секция выпрямителя - преобразует переменное напряжение от сети в постоянное напряжение (такое же, как в преобразователе частоты)
Секция сглаживающей цепи - сглаживает колебания постоянного тока (аналогично преобразователю частоты)
Преобразователь - преобразует постоянное напряжение в переменное с переменной частотой.Единственное отличие (от преобразователя частоты) заключается в использовании динамического тормоза.
Цепь управления — управляет секцией преобразователя. Он посылает обратную связь, изменяет режим работы, реагирует на ограничения (напряжение, скорость, крутящий момент) и другие действия.
Подробнее о соединениях и программном обеспечении вы можете узнать в следующей части этой серии статей.
GX Works 3 скачать
Инструкция ниже:
- Войдите в MyMitsubishi: https://pl3a.mitsubishielectric.com/fa/pl/mymitsubishi
- Перейти к программному обеспечению -> поиск GX Works3
- Качаем последнюю версию 1.035M
- Мы используем код установки 208-437676835
- Вместе с GX Works3 также установлен MR Configurator 2 - только для игры с сервоприводом (параметризация и прочее)
Подробнее о сервоприводах Mitsubishi можно узнать здесь: https://pl3a.mitsubishielectric.com/fa/pl/products/drv/servo/index.html
Статья создана совместно с iAutomatyka.номер
.
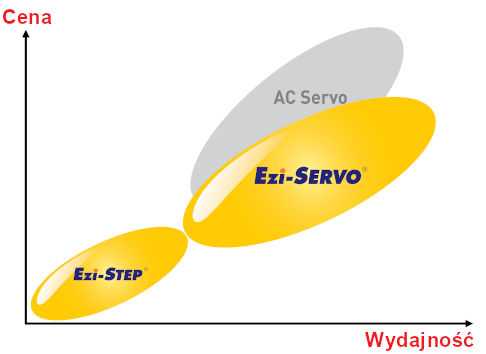
Основные характеристики семейства Ezi-SERVO
 |
- НЕ ПОТЕРЯЙТЕ КРО УРА! - ПЛАВНЫЙ ХОД (СЕРВО) - СТАБИЛЬНАЯ СКОРОСТЬ 0,2 об/мин! - ВОЗВРАТ НА ПОЗИЦИЮ ПОСЛЕ УДАРА ОТ НЕЕ - ОГРАНИЧЕНИЕ ТОКА ДВИГАТЕЛЯ - ВЫСОКИЙ КРУТЯЩИЙ МОМЕНТ - ЛЕГКИЙ ЗАПУСК - ТРЕВОЖНЫЕ ВЫХОДЫ - ЦЕНОВОЙ КОНКУРС НА СЕРВО - ВОЗМОЖНО УПРАВЛЕНИЕ ПО RS483 (PlusR и ВСЕ серии) - ПОЗИЦИОНЕР СО ВСТРОЕННЫМ СТОЛИКОМ НА 256 ПОЗИЦИЙ (PlusR и ВСЕ серии) |
|
|
Термин «шаговый сервопривод» является следствием его конструкции.Согласно определению сервопривода, он работает в замкнутом контуре обратной связи. Однако он был построен на основе шагового двигателя. Благодаря этому решению шаговый сервопривод часто оказывается более эффективным решением, чем сервопривод.
Почему шаговый сервопривод с обратной связью от энкодера более эффективен, чем традиционный сервопривод?
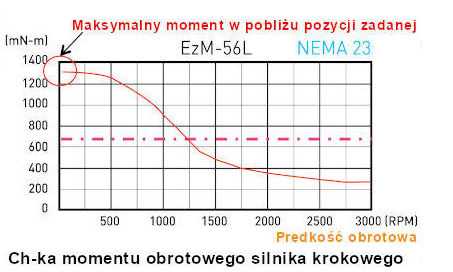
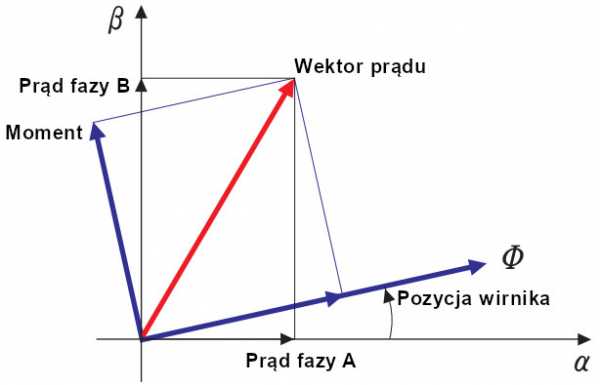
СРАВНЕНИЕ КРУТЯЩЕГО МОМЕНТА НА ВАЛАХ ШАГОВОГО И СЕРВОМОТОРА.
Момент серводвигателя пропорционален ошибке положения.Крутящий момент шагового двигателя не зависит от ошибки положения. Крутящий момент шагового двигателя зависит исключительно от скорости вращения.

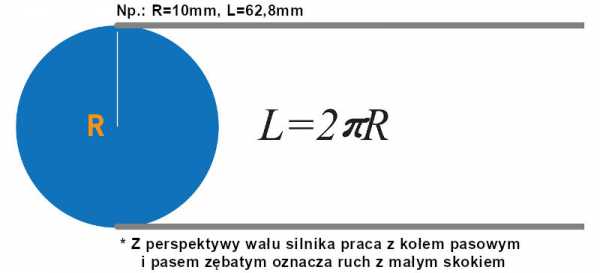
ПОЧЕМУ ШАГОВЫЙ ДВИГАТЕЛЬ ЛУЧШЕ ДЛЯ ПРИВОДА С ЗУБЧАТЫМ РЕМНЕМ?
Предполагая, что радиус шестерни составляет 10 мм, один оборот двигателя соответствует относительно большому линейному перемещению 62,80 мм. Поэтому большая часть линейных перемещений реализуется в небольшом диапазоне оборотов вала двигателя.Из-за меньшей жесткости этого вида нагрузки все вибрации и изменения нагрузки передаются на вал двигателя при каждой остановке. В случае сервопривода на скоростях, близких к нулю (при остановке серводвигателя), момент на валу двигателя слишком мал для удержания заданного положения, поэтому вибрация нагрузки передается на вал двигателя, вызывая вибрацию.
ПРЕИМУЩЕСТВО УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ С ЗАМКНУТОЙ ОБРАТНОЙ СВЯЗЬЮ.
Надежное позиционирование без потери синхронизации. Сохранение стабильного положения и автоматический возврат в заданное положение даже после ошибки позиционирования, вызванной внешними силами (механические вибрации или положения удержания в системах вертикального позиционирования). Ezi-SERVO позволяет использовать 100 % номинального крутящего момента, в то время как с обычными шаговыми двигателями из-за риска потери синхронизации доступно до 50 % номинального крутящего момента.Возможность работы на высоких оборотах благодаря регулированию тока двигателя в зависимости от нагрузки.
УПРАВЛЕНИЕ В ОБРАТНОЙ СВЯЗИ.
Благодаря использованию энкодера с высоким разрешением отслеживается текущее положение ротора двигателя. Таким образом, например, при резких изменениях нагрузки, Ezi-SERVO компенсирует положение вала, тем самым предотвращая потерю синхронизации двигателя. Устранение ошибки потери шага дает шаговым приводам новые возможности и открывает новые области применения.
БЕЗ НАСТРОЙКИ УСИЛЕНИЯ.
Высокофункциональный Ezi-SERVO находит особое применение в системах с малой жесткостью нагрузки (ременные системы, ременные передачи), в которых в силу своей специфики традиционные сервоприводы столкнутся со многими трудностями. Благодаря инновационному методу управления, в отличие от типичного сервопривода, Ezi-SERVO не требует хлопотной и трудоемкой настройки внутреннего регулятора.
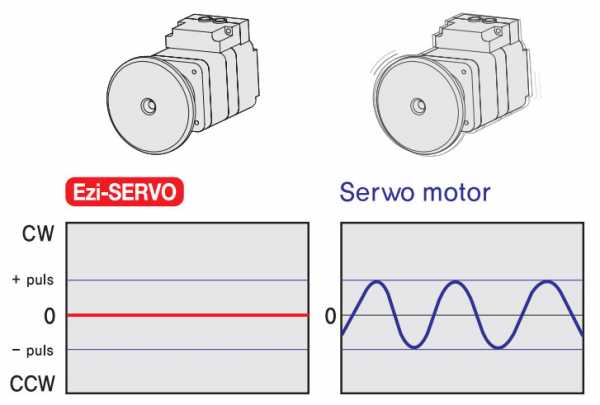
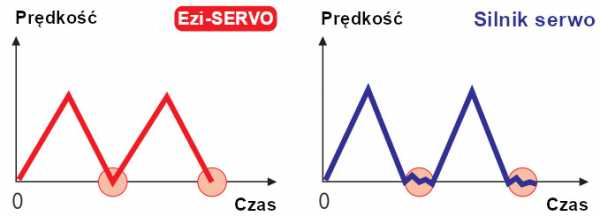
ОТСУТСТВИЕ ВИБРАЦИИ.
В отличие от традиционных сервоприводов, Ezi-SERVO полностью устраняет биение вала двигателя. Как только заданное положение достигнуто, Ezi-SERVO удерживает вал двигателя в полностью неподвижном состоянии. Эта функция особенно полезна при управлении устройствами технического зрения, где наличие вибрации является серьезной проблемой.
ПЛАВНОСТЬ ДВИЖЕНИЯ И ТОЧНОСТЬ.
Непрерывное измерение параметров вектора тока совместно с контролем положения ротора (10 000 импульсов на оборот) позволяет получить беспрецедентную для шаговых систем плавность вращения вала двигателя.
СКОРОСТЬ ОТВЕТА.
Хорошая синхронизация с управляющими импульсами, а также малое время отклика. Особенности, особенно полезные, когда есть необходимость получить быстрые заходы на посадку на короткие расстояния. Традиционные сервоприводы должны учитывать задержку движения в ответ на изменение значения управляющего сигнала. Это приводит к времени, необходимому для стабилизации вала двигателя, известному как время установления.
ВЫСОКОЕ РАЗРЕШЕНИЕ.
Блок сигнала положения ротора может быть разделен точно до тех пор, пока не будет достигнуто максимальное разрешение 10 000 импульсов на оборот.
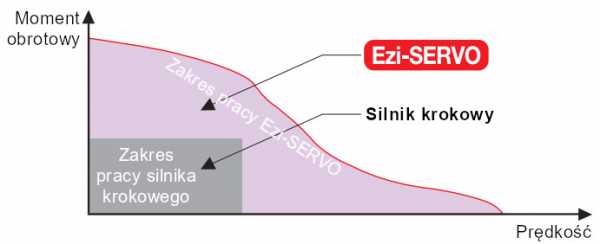
БОЛЬШОЙ КРУТЯЩИЙ МОМЕНТ
Высокий крутящий момент на холостом ходу сохраняется в течение относительно длительного периода времени. Контроллер имеет возможность регулировать скорость без потери синхронизации в диапазоне до 100 % значения нагрузки, вытекающей из характеристики момента двигателя. Это существенное преимущество перед традиционными микрошаговыми регуляторами, применение которых требует устойчивости к нагрузке.
ВЫСОКАЯ СКОРОСТЬ
Высокий крутящий момент на высокой скорости, полученный методом оптимизации фазы тока, протекающего через двигатель, по отношению к скорости вращения.

РЕГУЛИРОВАНИЕ ТОКА В ЗАВИСИМОСТИ ОТ НАГРУЗКИ
Уменьшение тепла, выделяемого двигателем, что повышает эффективность трансмиссии. Это стало возможным благодаря регулированию тока двигателя в зависимости от изменяющейся нагрузки.
Приводы
Ezi-SERVO также доступны со встроенным контроллером движения (так называемый позиционер) и обозначаются как PlusR или ALL. Таблица позиций (макс. 256 позиций) и все параметры движения хранятся во флэш-памяти контроллера. Порт RS485, которым оснащен контроллер, позволяет управлять работой до 16 накопителей одновременно. Fastech предоставляет библиотеки DLL для включения программного обеспечения привода под Windows 2000/XP.

РАБОТА В СЕТИ
применяется только к приводам серий PlusR и ALL )
Через последовательный интерфейс RS-485 главный ПК может управлять до 16 приводами Ezi-SERVO-Plus-R.Все условия работы привода задаются по сети и сохраняются как параметры во Flash ROM. Пользователь имеет в своем распоряжении графический интерфейс (GUI), работающий в среде Windows, с помощью которого он может параметрировать и управлять работой привода. Библиотека DLL также доступна для разработки собственного программного обеспечения.
ТАБЛИЦА ПУНКТОВ
(только для приводов PlusR и ALL серии )
Функция позволяет управлять движением через цифровые входы и выходы ведущего устройства.Управление мотором возможно благодаря прямой установке номера ряда в таблице позиций, сигналу СТАРТ/СТОП, сигналу активации поиска базы и другим цифровым сигналам. В ответ главный ПЛК-контроллер имеет в своем распоряжении сигналы, контролирующие работу привода: информация о положении, поиск базы, «в движении», остановка, готовность и другие. Таблица позиций содержит 256 строк данных — информация о трафике.
Усилитель тормозов ATE - TEVES 03.7755-4202.4 (VW TRANSPORTER IV Box (70XA), TRANSPORTER IV Bus (70XB, 70XC, 7DB, 7DW), TRANSPORTER IV Platform/Chassis (70XD))
Усилитель тормозов ATE - TEVES 03.7755-4202.4 ( VW TRANSPORTER IV Box (70XA), TRANSPORTER IV Bus (70XB, 70XC, 7DB, 7DW), TRANSPORTER IV Platform/Chassis (70XD)) - Inter Cars StoreК сожалению, для корректной работы сайта необходимо включить JavaScript в настройках вашего браузера.
Супер качествоУвеличение
Фотографии защищены авторским правом. Копирование их без согласия сайта запрещено.
Смотреть все фото
Характеристики товара| Производитель | ATE |
| Индекс | 03.7755-4202.4 |
| Brake system | ATE |
| Mode of operation | pneumatic |
| Diameter [inch] | 9 |
No product reviews
1 042,61 зл Цена за 1 шт.
Курьерская доставка DHL 0,00 злотых 1-2 рабочих дня
Доставка курьером DPD. 0,00 злотых 1-3 рабочих дня
Самовывоз в пункте самовывоза 0,00 злотых 2ч-2 рабочих дня
Проверьте, подходит ли продукт для вашего автомобиля
Характеристики продукта
| Производитель | ATE |
| Индекс | 03.7755-4202.4 |
| Тормозная система | ATE |
| Режим работы | .