Робот или автомат в чем разница
Чем отличается коробка автомат от робота и что такое робот
Современные автомобили оборудуются разными типами коробок передач и потребителю особенно при покупке своей первой машины бывает тяжело сделать правильный выбор среди этого разнообразия трансмиссий.
Поэтому в этой статье попробуем понять, чем отличается коробка автомат от робота, именно этот вопрос волнует многих будущих автовладельцев.

Отличие робота от автомата
Коробка автомат. Как вы знаете, в состав автоматической коробки передач входят два основных узла — это гидротрансформатор и редуктор. Гидротрансформатор обеспечивает плавное и безрывковое переключение передач, по сути, он работает вместо сцепления, которое есть на машинах с механической коробкой передач.
Редуктор автомата состоит из определённого набора шестерёнок, они находятся в зацеплении и образуют несколько ступеней: 4, 5, 6 и даже 8.
Из-за особенностей конструкции, автоматическая коробка передач исходя от оборотов мотора и нагнетания масляного давления сама переключает ступени (скорости), без вмешательства водителя. Благодаря такому переключению скоростей, электроника используется по минимуму.
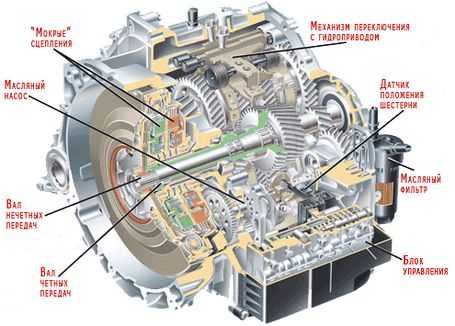
КПП робот что это? Если сказать просто, то на механическую коробку передач поставили блок управления, который состоит из гидропривода и сервопривода (электронный узел). Вот этот блок, без вмешательства человека, заведуют сцеплением и переключением передач.
Коробка робот
Принцип работы робота как у механики, только всё происходит автоматически — гидравлика с электронным управлением всё сделает сама.
Плюсы и минусы автомата и робота
Чтобы лучше понять, чем отличается автоматическая коробка передач от роботизированной, давайте рассмотрим их эксплуатационные характеристики.
1. АКПП значительно снизила нагрузку на водителя при управлении автомобилем, особенно это заметно при движении в городских условиях. Современные автоматические коробки передач (адаптивные) способны даже подстраиваться под каждого водителя, под его стиль езды. Также, автомату свойственно мягкое и незаметное переключение скоростей.
Есть у автоматической коробки передач и минусы — это повышенный расход топлива, особенно в городе и ремонт автомата, который иногда случается, выльется в приличную сумму.
2. Робот относится к механике, значит обслуживание и ремонт будет дешевле, чем у автомата. Расход топлива у автомобиля с коробкой роботом приравнивается к МКПП, а в условиях города даже ниже, что не может не радовать. Ещё, роботы кушают масла по меньше, чем автоматы.
Роботы передают крутящий момент от мотора к колёсам автомобиля без существенных потерь, чего не скажешь об автомате. Большой плюс роботизированной коробки в том, что она поддерживает ручное переключение скоростей, чего нет у многих автоматов.
Есть у робота и минусы — это медленное переключение скоростей и толчки с рывками в работе коробки, это случается довольно часто, если водитель очень сильно давит на педаль газа. Также, в городской черте во время стоянок необходимо рычаг селектора ставить в положение «нейтраль».
А зачем так делать, можете узнать в этом видео, где рассказано о коробке робот.
Подведём итоги, чем отличается автомат от робота:
- робот — это механическая коробка передач с блоком управления, автомату присуща своя конструкция;
- при переключениях передач автомат выигрывает у робота по скорости и плавности переключений;
- у робота есть ручное переключение, а у многих автоматов подобная функция отсутствует;
- коробка робот потребляет топлива и масла меньше, чем автомат;
- обслуживание и ремонт роботизированной коробки дешевле, чем автоматической коробки.
Заключение. Моё мнение: робот — это тёмная лошадка, от которой можно ожидать неприятных сюрпризов. Я выбираю автомат, он изучен и предсказуем в работе, тем более, новые автоматические коробки с большим набором передач приближаются уже по расходу топлива к механике и также, эти автоматы могут подстраиваться под каждого водителя.
Кто не согласен с моей точкой зрения, может поделиться в комментариях.
Загрузка...Чем робот отличается от автомата
Современные автомобили оборудуются разными типами коробок передач и потребителю особенно при покупке своей первой машины бывает тяжело сделать правильный выбор среди этого разнообразия трансмиссий.
Поэтому в этой статье попробуем понять, чем отличается коробка автомат от робота или вариаторной трансмиссии, именно этот вопрос волнует многих будущих автовладельцев.
Отличие робота от автомата
Коробка автомат. Как вы знаете, в состав автоматической коробки передач входят два основных узла — это гидротрансформатор и редуктор. Гидротрансформатор обеспечивает плавное и безрывковое переключение передач, по сути, он работает вместо сцепления, которое есть на машинах с механической коробкой передач.
Редуктор автомата состоит из определённого набора шестерёнок и пакетов фрикционных дисков, они находятся в зацеплении и образуют несколько ступеней: 4, 5, 6 и даже 8,9.
Из-за особенностей конструкции, автоматическая коробка передач исходя от оборотов мотора и нагнетания масляного давления сама переключает ступени (скорости), без вмешательства водителя. Благодаря такому переключению скоростей, электроника используется по минимуму - такая система использовалась ранее(в полностью гидравлических АКПП, автомобилях выпущенных перимущественно до 2000 года). В современных Автоматических коробках передач, самые передовые технологии работают для повышени эффективности и увеличения комфорта владельцев автомобилей(ЭБУ АКПП И Двигателя тесно связаны между собой. Работа Коробки Передач, теперь напрамую зависит не только от оборотов двигателя, но и от сигналов полученных от педали газа или тормоза, датчиков температуры масла АКПП или охлаждающей жидкости ДВС, сигналов системы ABS. Электронные компоненты играют всё более важную роль в работе Автоматический Коробки Передач. Это позволяет максимально снизить расход топлива и выполнять переключения передач менее заметными для водителя, а при необходимости ускорения - перейти на необходимую передачу намного быстрее, чем на полностью гидравлических коробках. Но и здесь есть свои минусы: увеличение электронных компонентов влечет и большие затраты при ремонте АКПП - к примеру на современных автомобилях некоторых производителей очень часто выходит из строя электронная плата управления АКПП, замена или ремонт которой естественно увеличивает затраты на ремонт АКПП.
КПП робот что это? Если сказать просто, то на механическую коробку передач поставили блок управления, который состоит из гидропривода и сервопривода (электронный узел). Вот этот блок, без вмешательства человека, заведуют сцеплением и переключением передач.
Принцип работы робота как у механики, только всё происходит автоматически — гидравлика с электронным управлением всё сделает сама. К роботам можно так-же отнести и современные коробки с сухим или мокрым сцеплением - (DSG у VAG группы, PowerShift у Ford, Speedshift DCT от Mercedes-Benz и многие другие)
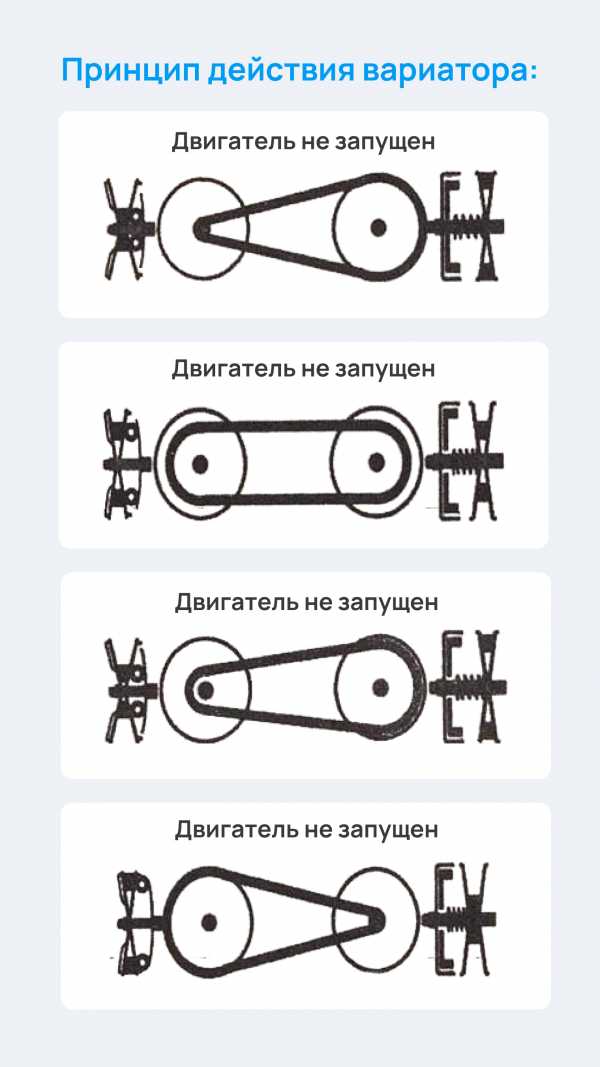
Вариаторная коробка передач или Вариатор(CVT). Этот тип трансмисии стал широко популярен среди всех крупных автомобильных концернов как Азиатских так и Европейских. Работа Вариаторной(CVT) трансмиссии принципиально отличается от работы Автоматической или Роботизированной коробки переключения передач. В ней используется ременная(ремень состоит из секторов закрепленных специальной лентой, выполненный из металла) или цепная передача. Ремень или цепь работает между ведущим и ведомым шкивом, а изменение передаточного отношения происходит за счет увеличения или уменьшения радиуса по которому работает цепь или ремень - это можно сравнить с работой шестеренок на спортивном велосипеде: когда вы выбираете переднюю(которая непосредственно установлена на валу с педалями) шестеренку меньшего диаметра, а задняя шестерня(которая на заднем колесе велосипеда) выбрана большего диаметра, то для движения по дороге нужно большее количество оборотов передней шестеренки, но при этом усилие для вращения нужно совсем небольшое(это сравнимо с 1й передачаей на автоматической или механической коробке), и постепенно разгоняясь, можно изменять передаточное отношение меняя переднюю шестерню на больший диаметр, а заднюю на меньший - так увеличится скорость и при этом уменьшатся обороты для поддержания этой скорости.В вариаторах это произходит очень плавно, поэтому эту коробку называют безступенчатой. В вариаторных трансмиссиях присутвует и гидротрансформатор, который выполняет функцию как и в АКПП передачи крутящего момента от двигателя к трансмиссии. Но есть и исключения - в некоторых случаях вариатор устанавливается и без гидротрансформатора(в таких случаях передача крутящего момента происходит за счет шлицевого соединения - вал из вариатора вставляется в шлицы на маховике ДВС). По последним тенденциям производители Вариаторов вообще хотят отказаться от использования гидротрансформаторов, это позволит снизить потери мощьности и увеличить топливную экономичность!
Плюсы и минусы автомата, робота и вариатора
Чтобы лучше понять, чем отличается автоматическая коробка передач от роботизированной, давайте рассмотрим их эксплуатационные характеристики.
1. АКПП значительно снизила нагрузку на водителя при управлении автомобилем, особенно это заметно при движении в городских условиях. Современные автоматические коробки передач (адаптивные) способны даже подстраиваться под каждого водителя, под его стиль езды. Также, автомату свойственно мягкое и незаметное переключение скоростей.
Есть у автоматической коробки передач и минусы — это повышенный расход топлива, особенно в городе, увеличение времени разгона(отбор некоторого количества мощности ДВС для работы АКПП).
2. Робот относится к механике, значит обслуживание и ремонт будет дешевле, чем у автомата. Но это только на коробках с обычным приводом сцепления и переключением передач, а таких автомобилей всё меньше - их вытесняют с рынка современные и более эффективные двух дисковые роботы с сухим или мокрым сцеплением, а ремонт таких коробок на порядок дороже чем АКПП или Вариатора. Расход топлива у автомобиля с коробкой роботом(как классическим так и современным) приравнивается к МКПП, а в условиях города даже ниже, что не может не радовать.
Роботы передают крутящий момент от мотора к колёсам автомобиля без существенных потерь, чего не скажешь об автомате. Большой плюс роботизированной коробки в том, что она поддерживает ручное переключение скоростей, чего нет у многих автоматов.А современные роботизированные коробки имеют самые лучшие показатели по скорости переключения передач.
как устроены автомобильные коробки передач — Mafin Media
Ко всем статьямРазобравшись с устройством двигателя, можно смело переходить к его «паре». Ведь двигатель создает мощность, но именно через коробку передач эта мощность начинает путь к колесам авто. Об основных типах «коробок» и их устройстве — в материале Mafin Media.
Различают по ступеням. А точнее — по их наличию
Любая КПП (коробка переключения передач) — это трансмиссия (от англ. transmission — передача), то есть механизм, преобразующий крутящий момент таким образом, чтобы в конечном счете вращать колеса автомобиля. Крутящий момент простыми словами — сила, с которой вращается коленвал двигателя.
Вопреки распространенному суждению, коробки переключения передач делятся не на «механику» и «автомат» (что отчасти верно, но весьма условно), а на ступенчатые и бесступенчатые. Самые популярные как раз ступенчатые: это и механическая КПП, и гидромеханический автомат, и «робот», чаще всего устанавливаемые на легковые авто. Также известны, но менее популярны бесступенчатые вариаторы, знакомые любителям скутеров и квадроциклов.
Механическая коробка передач (MT/МКПП)
Самый простой и бюджетный тип трансмиссионного устройства — механическая коробка — представляет из себя набор валов (продолговатых металлических цилиндров или трубок) с нанизанными на них шестернями. Шестерня — это зубчатое колесо, передающее движение. В каждой «механике» (прозванной так за рычаг коробки и педаль сцепления, которыми нужно орудовать самостоятельно, совершая механические движения) есть несколько разных шестеренок. Именно они и есть та самая передача, которая транслирует крутящий момент с двигателя на колеса.
Соотношение разных шестерен на разных валах позволяет выбирать разные скорости, причем не только фигурально («передача» и «скорость» — синонимы), но и буквально: каждая передача рассчитана на движение в определенном скоростном диапазоне. Проще говоря, гражданскому авто на «первой» до 100 км/ч не разогнаться.
Для того чтобы передачу можно было сменить, используется сцепление — «головная боль» начинающих водителей. Двигатель и коробка соединяются диском сцепления, который получает мощность от маховика двигателя и передает ее на коробку передач. Диски необходимо соединять и разъединять вручную — а чаще «вножную». Когда водитель нажимает на педаль, он преодолевает сопротивление пружины «корзины» сцепления, отвечающей за соединение и разъединение маховика и диска сцепления.
Гидромеханический автомат (AT/АКПП)
Еще лет 30 назад автомобиль с двумя педалями вместо трех был заветной мечтой многих горожан. Гидромеханический автомат подразумевает отсутствие жесткого сцепления между коробкой и двигателем. Появились такие коробки передач позже ручных собратьев: ближе к середине XX века своего первенца представила General Motors.
Гидромеханической трансмиссию называют потому, что переключение передач происходит за счет течения рабочей жидкости внутри механизма. За это отвечает гидротрансформатор — в просторечии «бублик».
Он соединен с двигателем и содержит два лопастных колеса. Благодаря движению через них масла лопастные колеса передают мощность двигателя в АКПП. Поскольку гидротрансформатор забирает часть мощности мотора для раскрутки лопастных колес, динамика и экономичность падают. Однако многие предпочтут потерять пару литров и секунд, но не утомляться ручными переключениями. Первым серийным авто с относительно надежной и долговечной АКПП считается Oldsmobile Series 60 — автомат как опция стал доступен для авто с 1940 модельного года.
Робот (РКПП)
Роботизированная коробка передач названа так потому, что представляет собой электронно управляемую МКПП, где комплекс механизмов и процессоров, которые условно можно назвать роботом, выполняет за водителя работу по переключению. Эти коробки появились лишь в конце XX века.
Первоначально РКПП имели одно сцепление, как и обычная «механика», были дешевле традиционного автомата, обеспечивали меньшую потерю мощности и ставились на машины попроще, например Ford Fusion, Peugeot 107, Opel Corsa и т. д. Переключения выполняли специальные механизмы — сервоприводы. Жесткие, рваные и медленные переключения вкупе с быстрым износом сцепления свели их популярность на нет и передали планку современным собратьям — роботам с двумя сцеплениями.
Большинство из них известно поименно: это Direct Shift Gearbox от VAG (Volkswagen Audi Group), Dual Clutch Transmission от Hyundai/Kia, PowerShift от Ford и т. д. Их главная особенность — наличие двух независимых сцеплений: пока одна передача ведет автомобиль, другая уже включена и ожидает своего соединения с мотором. Это существенно усложняет конструкцию узла, но позволяет избегать задержек и рывков при переключении. Более того, робот с двумя сцеплениями (а иногда даже и с одним) по способности экономить топливо легко потягается с традиционной механикой!
Бесступенчатые трансмиссии (CVT)
Наиболее популярная бесступенчатая трансмиссия в автомобилестроении — вариатор, или CVT (Continuously Variable Transmission — в пер. с англ. «постоянно изменяющаяся передача»). В отличие от коробок, рассмотренных ранее, фиксированных передач у вариатора нет. Для транслирования мощности от мотора к колесам используется ремень (или цепь), который вращается между двумя шкивами, то есть колесами с выемками-желобами, предназначенными для «надевания» этого ремня. Один из шкивов приводится в движение мотором и потому называется ведущим, а другой — ведомым.
В зависимости от скорости диаметр шкивов меняется и передаточные числа меняются планомерно, без переключений, свойственных ступенчатым коробкам:

Первым серийным автомобилем с вариатором считается DAF 600, которому недавно исполнилось 60 лет.
Вариатор, робот или обычный автомат — что выбрать? — журнал За рулем
Общие соображения насчет плюсов и минусов «ручки» и автомата мы недавно высказывали. Однако тут же пообещали продолжить тему: ведь автоматы не ограничиваются одной только гидромеханикой. Разбираемся в роботах, вариаторах и прочих DSG.
Впервые столкнулся с этим типом коробки передач, взяв в середине нулевых в аренду в Италии Fiat Grande Punto с 90-сильным турбодизелем и однодисковым роботом.
 На таком склоне «фиатик» подарил мне несколько седых волос.
На таком склоне «фиатик» подарил мне несколько седых волос.На таком склоне «фиатик» подарил мне несколько седых волос.
Материалы по теме
Машина один раз настолько быстро предательски покатилась назад, что едва не повредила стену замка, стоявшего там с XIV века. Из других воспоминаний — безобразный разгон, неадекватное поведение в пробках. Редакционные Веста и Иксрей с АМТ также показали себя не с лучшей стороны во время поездок по городу. Дерганые и неприятные в управлении машины. Да и ресурс сцепления, по словам коллеги, постоянно ездящего на Весте, оказался весьма невысок.Короче, мое мнение: однодисковый робот — ни за что. Лучше танцевать джигу на педалях служебного Ларгуса с механической коробкой передач в диких московских пробках, когда десяток километров порой продираешься час, чем такие автоматы.
Робот с двумя сцеплениями
Примеры использования: некоторые модели Mercedes-Benz, BMW, Mini, Ford, большинство автомобилей концерна Volkswagen, включая Audi, Skoda, Seat.
Суть идеи состоит в том, что за четные и нечетные передачи отвечают отдельные первичные валы и, соответственно, отдельные диски сцепления. Если вы движетесь на первой передаче, то второй вал уже вращается на второй! За счет этого переключение происходит очень быстро — за миллисекунды. Человек на такую проворность неспособен. При этом никакие рывки во время смены передач практически не ощущаются. Используются как «мокрые» диски сцепления, работающие в масле, — тогда это шестиступенчатая коробка DSG 6, так и «сухие» — 7-ступенчатая DSG. Ресурс «сухих» сцеплений весьма ограничен и практически никогда не достигает 100 000 км пробега, а при агрессивной езде не превышает порой 30 000 км.
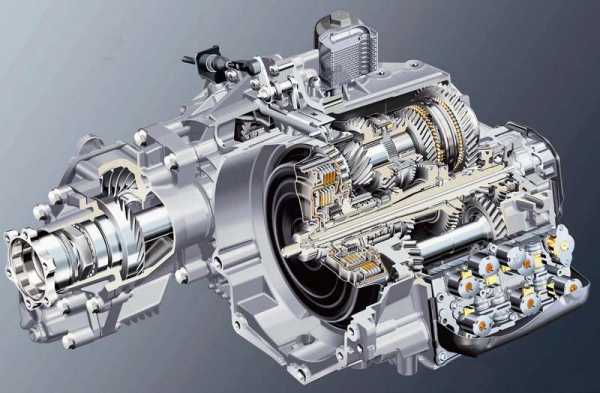
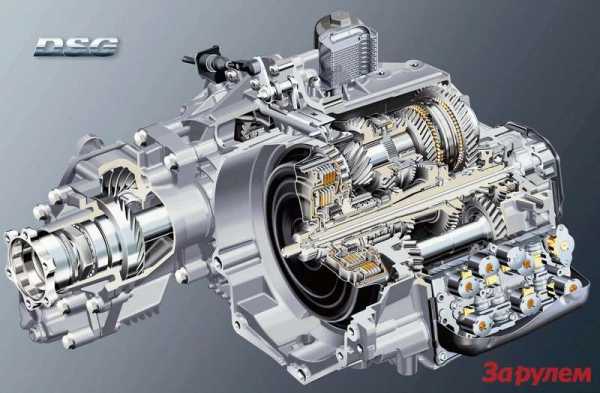 Коробка DSG с «мокрым сцеплением» для автомобилей с поперечным расположением двигателя.
Коробка DSG с «мокрым сцеплением» для автомобилей с поперечным расположением двигателя.Коробка DSG с «мокрым сцеплением» для автомобилей с поперечным расположением двигателя.
| Достоинства | Недостатки |
|
|
 Шкода с роботизированной коробкой передач DSG. Мечта на протяжении первых 30–80 тысяч километров пробега.
Шкода с роботизированной коробкой передач DSG. Мечта на протяжении первых 30–80 тысяч километров пробега.Шкода с роботизированной коробкой передач DSG. Мечта на протяжении первых 30–80 тысяч километров пробега.
Личные впечатления ограничиваются поездками на автомобилях, которые нашему издательству предоставляют для испытаний российские представительства различных марок. Машины эти практически новые, с небольшими пробегами, на которых характерные проблемы двухдисковых роботов еще не успели проявиться. Все выглядит отлично: быстро, мощно, тихо — одни плюсы. Если же выбирать автомобиль для личного пользования, а пробег предстоит накатывать большой, то лучше предпочесть в качестве коробки передач традиционный гидромеханический автомат или старую добрую механику.
Вариаторы
Кайф от такой коробки состоит в том, что привычных ступенчатых переключений здесь нет в принципе! На входном и выходном валах закреплены конусообразные диски, образующие в сумме эдакий шкив с изменяемым диаметром. Валы соединяет передача — клиноременная, цепная и т.п. Смещая конусы друг относительно друга, можно плавно изменять передаточное число. Игрушка — не из дешевых. Для работы требуется особая трансмиссионная жидкость, уровень которой нужно тщательно контролировать.
Разновидностей вариаторов довольно много — ниже перечислены основные.
Вариатор клиноременный
Примеры использования: Nissan Qashqai, Nissan X-Trаil, Renault Kaptur, Mitsubishi Outlander и др.
 Бесступенчатые коробки передач часто устанавливают на популярные кроссоверы. Логика проста: для семейной машины более комфортной в работе коробки еще не придумали.
Бесступенчатые коробки передач часто устанавливают на популярные кроссоверы. Логика проста: для семейной машины более комфортной в работе коробки еще не придумали.Бесступенчатые коробки передач часто устанавливают на популярные кроссоверы. Логика проста: для семейной машины более комфортной в работе коробки еще не придумали.
Клиноременный вариатор на сегодняшний день наиболее распространенный тип бесступенчатых коробок передач. Крутящий момент транслирует металлический толкающий ремень. Торцы надетых на ленту трапециевидных элементов, соприкасаясь с конусами, приводят их во вращение. Вместе с тем применен обычный гидротрансформатор с блокировкой, как на гидромеханических автоматах. При троганье с места гидротрансформатор повышает крутящий момент двигателя вплоть до величины в четыре раза большей. Применение этого узла обеспечивает плавное начало движения при передвижении в городских пробках.
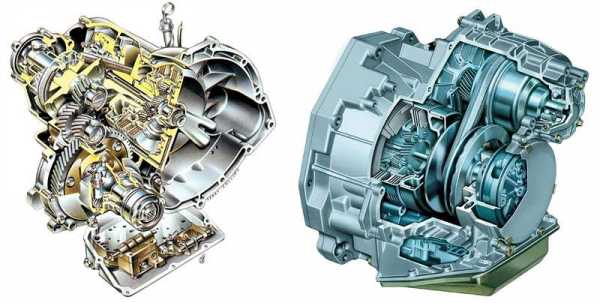 Вариатор может быть даже компактнее механической коробки передач.
Вариатор может быть даже компактнее механической коробки передач.Вариатор может быть даже компактнее механической коробки передач.
| Достоинства | Недостатки |
|
|
Вариатор клиноцепной
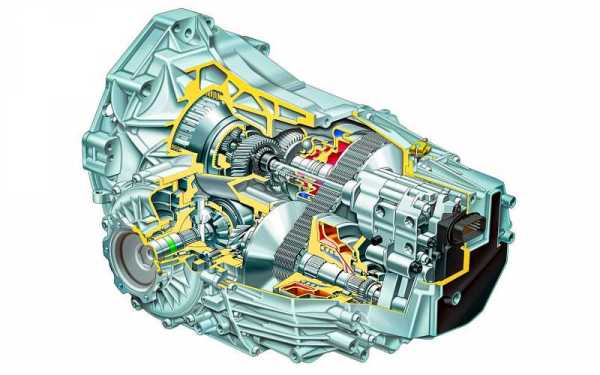
Примеры использования: Audi А6, Subaru Forester.
Устройство похоже на клиноременный вариатор, но вместо ремня в качестве передачи используется металлическая цепь, состоящая из пластин, соединенных клиновидными осями. Именно торцы этих осей и передают крутящий момент. Другое отличие состоит в том, что в коробках Audi используется пакет сцеплений и двухмассовый маховик вместо гидротрансформатора.
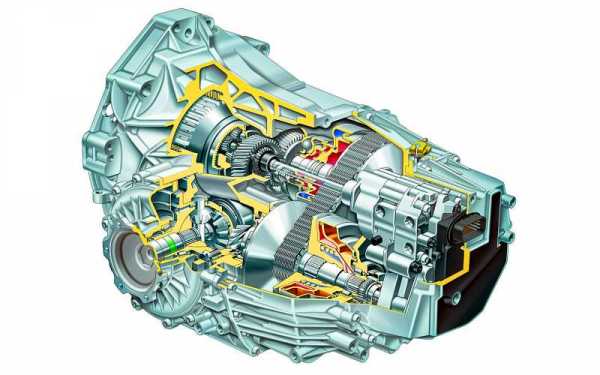 Вариатор, устанавливаемый на Ауди, спроектирован под продольное расположение двигателя.
Вариатор, устанавливаемый на Ауди, спроектирован под продольное расположение двигателя.Вариатор, устанавливаемый на Ауди, спроектирован под продольное расположение двигателя.
| Достоинства | Недостатки |
|
|
Оба типа бесступенчатых трансмиссий в последнее время стали делать с виртуальными ступенями. Якобы это больше нравится водителям, потому что двигатель не воет на одной ноте.
 Обычно вариатор быстро перегревается при езде по серьезному бездорожью. Достаточно немного побуксовать. Но есть и исключения. Например, Subaru Forester, оснащенный вариатором, способен на многое за пределами асфальта.
Обычно вариатор быстро перегревается при езде по серьезному бездорожью. Достаточно немного побуксовать. Но есть и исключения. Например, Subaru Forester, оснащенный вариатором, способен на многое за пределами асфальта.Обычно вариатор быстро перегревается при езде по серьезному бездорожью. Достаточно немного побуксовать. Но есть и исключения. Например, Subaru Forester, оснащенный вариатором, способен на многое за пределами асфальта.
По потребительским свойствам вариатор — лучший тип коробки передач. Она обеспечивает быстрый разгон, а что до монотонного звука... Помнится, Хоттабыч удалил звук двигателей летящего самолета, а к чему это привело? Участники событий едва спаслись... На ровном шоссе при скорости автомобиля чуть за сотню обороты двигателя не достигают 2000. Торможение двигателем — есть. Лично я побаиваюсь за ресурс ремня и грею зимой даже больше не двигатель, а вариатор. А так — идеальная коробка (тьфу, не передач)!
И, да, забыл: вариаторы на склоне назад не откатываются!
Старая добрая гидромеханическая коробка передач
Примеры использования: практически весь модельный ряд корейских и американских брендов, а также относительно мощные автомобили других производителей.
Представляет собой ступенчатую планетарную коробку передач, соединенную с двигателем через гидротрансформатор. Выбор и переключение планетарных рядов раньше осуществлялись гидромеханически, а сейчас вездесущая электроника вместе с системой управления двигателем определяет, на какой передаче следует работать силовому агрегату в данный момент. Число ступеней постоянно увеличивается, достигая девяти на самых дорогих автомобилях.| Достоинства | Недостатки |
|
|
Материалы по теме
Четырехступенчатые гидромеханические коробки передач современным требованиям удовлетворяют все меньше и меньше. На разгоне и при эксплуатации в городе переключения чувствуются довольно заметно. На трассовых скоростях велик расход топлива из-за невозможности обеспечить оптимальные обороты двигателя. Даже небольшое увеличение подачи топлива приводит к переходу на третью передачу, и двигатель взвывает еще сильнее.Здесь особенно выделяется «всефранцузская» четырехступенчатая коробка передач DP0. Эту коробку и ее многочисленные реинкарнации до сих пор устанавливают на огромное число относительно маломощных автомобилей Peugeot, Citroen и Renault. Наиболее часто в нашей стране с этой коробкой сталкивались владельцы таких автомобилей, как Peugeot 307, Citroen С4, Renault Logan (со всем семейством) и Megane. Нрав коробки довольно строптивый, случаются «затыки» с переключениями. Надежность тоже не выдающаяся: редкая КП этого типа доживает до 80 тысяч км без ремонта. Причем иногда удается обойтись заменой клапанов, а порой приходится менять половину «начинки».
А вот «всеяпонский» производитель автоматов Jatco сумела сделать относительно беспроблемную «четырехступку». Одна из версий ставится даже на седанчик и хэтчбек, выпускающиеся у нас под японским брендом Datsun.
И все-таки для современного автомобиля с гидромеханическим автоматом число ступеней должно быть не меньше шести. Сверхпопулярные Rio и Solaris в последней генерации это полностью подтверждают. Многоступенчатые автоматы куда экономичнее, особенно при езде по трассе. На мощных бизнес-седанах, на тяжелых кроссоверах и внедорожниках альтернативы гидромеханическим трансмиссиям и вовсе нет и пока не предвидится. Скорее уж они станут гибридными, и тогда вся трансмиссия будет скомпонована совсем иначе. Но это уже другая история.
Выводы
Для тяжелых условий эксплуатации, для мощных двигателей или в ситуации, когда нравящаяся машина не выпускается с другим типом автомата, можно брать гидромеханическую коробку передач. Но с числом ступеней не меньше шести.
Вариатор хорош в составе малых и средних автомобилей (не больше, чем среднеразмерный кроссовер).
Автомобиль с роботизированной коробкой передач и двумя сцеплениями советую покупать, только если вы собираетесь ездить на нем не дольше гарантийного срока. Дальше все преимущества будут нивелированы дорогостоящим ремонтом. Автомобили с однодисковым роботом, на мой взгляд, не достигли совершенства в области удобства управления тягой и не отличаются высокой надежностью в трудных условиях.
В заключение, как обычно, жду от вас комментариев. Какой тип коробки передач вам нравится, на каком ездите и о каком мечтаете?
Фото: «За рулем» и фирмы-производители
Автомат? Робот? Вариатор? — 5 плюсов и 5 минусов каждого — журнал За рулем
Автоматические трансмиссии разных типов отличаются не столько долговечностью, сколько особенностями работы.
Сегодня уже практически каждая модель на авторынке оснащается автоматической трансмиссией — классическим гидромеханическим автоматом, вариатором или роботизированной коробкой. Особенности каждого из агрегатов рассмотрели эксперты «За рулем».
Гидромеханический автомат
Материалы по теме
Гидромеханический автомат — самый распространенный ввиду своей универсальности тип автоматических коробок. Ресурс у АКП самый разный: от 120 тысяч до 250 тысяч километров.Главной же особенностью автомата является его выносливость: он может не только передавать большой крутящий момент мощного двигателя на колеса, но и пригоден для езды по бездорожью. Сегодня для легковых автомобилей выпускаются не только 4-ступенчатые автоматы, но и 6-ступенчатые, и даже 10-ступенчатые. Чем больше ступеней, тем миниатюрнее механизм и тем меньше у него запас прочности.
Плюсы: | Минусы: |
|
|
Вариатор
Вариатор отличается плавностью работы — передач здесь нет, а крутящий момент передается через ремень, скользящий по конусам и меняющий соотношение их оборотов. Ресурс вариаторов сопоставим с ресурсом гидромеханических автоматов. Но вариаторы не любят бездорожья и пробуксовок, перегреваются и быстрее выходят из строя. При этом в городе такая коробка незаменима именно благодаря плавности работы из-за отсутствия переключений.
Плюсы: | Минусы: |
|
|
Роботизированная коробка передач
Роботы бывают двух типов — с одним сцеплением и с двумя. По сути, это механические коробки, сцеплением и переключениями в которых управляют автоматика и электроника. Робот с одним сцеплением медлителен, а при переключениях автомобиль с ним «клюет носом», если водитель не успевает приотпустить в этот момент педаль газа. Вопреки ожиданиям, некоторые роботы с одним сцеплением не очень надежны. Зато дешевы.
Плюсы: | Минусы: |
|
|
Робот с двумя сцеплениями гораздо расторопнее — он всегда держит следующую передачу наготове, из-за чего переключения происходят моментально и незаметно. Есть варианты с мокрым или менее надежным сухим сцеплением. Главная особенность всех роботов — они не любят езду по городу с частыми остановками в пробках и на светофорах.
Плюсы: | Минусы: |
|
|
Подробности детального сравнения с указанием степени надежности различных коробок, устанавливаемых на популярные в России автомобили Hyundai/Kia, Renault, Nissan, Subaru и Аudi, а также Volkswagen и Lada, — в июньском выпуске журнала «За рулем» (уже в продаже).
- О заблуждениях относительно вариаторов и об их реальном недостатке читайте здесь.
- Продлить срок службы любого механизма помогут современные присадки в ГСМ.
Автомат, робот или вариатор. Какую коробку передач выбрать? | Об автомобилях | Авто
Обычно под одним словом «автомат» понимают один из трёх наиболее популярных видов трансмиссии: классическую АКПП, роботизированную или вариаторную. Сказать определённо, какая коробка лучше, нельзя, иначе производители не придумывали бы разные конструкции. Выбор зависит от личных предпочтений и целей автомобилиста. Разберемся, в чём отличия.
Классика
Самым старым из типов автоматической трансмиссии является так называемый классический автомат, который Cadillac стал использовать ещё в 30-х годах прошлого века. Роль сцепления, которое соединяет мотор с коробкой передач, выполняет гидротрансформатор. Долгое время автоматы были четырёхступенчатыми, и только в последние годы современные машины стали комплектовать восьми- и девятидиапазонными коробками.
Плюсами классической гидромеханической АКПП является достаточно плавное переключение передач и высокая надёжность по сравнению с другими трансмиссиями. Конечно, не считая старую добрую механику — по этому показателю её простая конструкция вне конкуренции. Автоматы без вмешательства техников спокойно проживают в среднем 150–200 тысяч километров. Хотя по ресурсу агрегаты от разных производителей могут существенно отличаться. В большинстве случаев проблемы можно решить ремонтом конкретной детали в механической части КПП. В целом же, гидромеханический автомат — дорогой узел.
К созданию других коробок инженеров подтолкнули недостатки классических АКПП. Они вызывают повышенный аппетит и не могут похвастаться головокружительной динамикой. Хотя с развитием сложных конструкций и технологий разница всё менее существенна, тем не менее при прочих равных она есть.
Быстрый и сложный
Решить проблемы автомата была призвана роботизированная трансмиссия. Если не вдаваться в подробности, робот — это конструктивно та же механика, только с автоматизированным сцеплением и переключением передач. Из-за упрощённого механизма такие коробки легче и занимают меньше места, что позволило устанавливать их даже на малолитражки вроде Fiat 500 или Opel Corsa. Важный плюс — автомобили с роботами реже заезжают на заправку.
Однако простые роботы с одним сцеплением на недорогих машинах имеют раздражающий эффект — постоянные задержки, толчки и рывки при переключениях, что особенно мешает в пробках. Неприятную особенность конструкции инженеры со временем решили, создав преселективный робот. Самый известный — DSG от концерна Volkswagen. По сути, это две коробки с двумя сцеплениями. Одна включает чётные передачи, другая — нечётные. В результате удалось добиться очень быстрого и точного переключения передач без разрыва мощности, не создавая никакого дискомфорта водителю.В сложных роботизированных коробках спорткаров, таких как Ferrari или Lamborghini, переход на высшую ступень происходит за сотые (!) доли секунды. Многие производители указывают время разгона до сотни на автомобилях с продвинутым роботом даже меньше, чем с механикой. Просто человек никак не сможет опередить эту совершенную технику.
Удобство, динамика, экономичность — прекрасное сочетание. Неспроста именно преселективные роботы на данный момент считаются самым оптимальным видом автоматической трансмиссии. Однако у них есть ощутимый минус, с которым многие водители не могут смириться. Сложная конструкция делает практически любой ремонт коробки дорогостоящим занятием. Да и надёжность роботов у многих марок вызывает вопросы.
Без ступеней
Вариаторы — вообще отдельное направление. По большому счёту, это и не коробка передач, потому что в трансмиссии передач нет вовсе. Не будем вдаваться в подробности про изменение передаточных чисел благодаря вращению ремня по шкивам. Скажем лишь, что особенная конструкции позволяет автомобилю непрерывно передавать крутящий момент на колёса, а потому предельно плавно набирать скорость. Никаких рывков и толчков. Впрочем, у медали есть обратная сторона. При динамичном разгоне мотор «зависает» на определённых оборотах, что создаёт эффект троллейбуса. Двигатель шумно и монотонно гудит. Со временем этот недостаток разные производители устраняют. Современные бесступенчатые трансмиссии умеют так ловко имитировать работу классического автомата, что обыватель и не разберётся. Но это исключительно вопрос акустического комфорта.
Несомненным плюсом машин с вариатором можно назвать топливную экономичность. В паспортных данных расход «горючки» зачастую указывают ниже, чем на таких же автомобилях с механикой. Но, к сожалению, вариаторы достаточно капризны. Их нельзя перегревать и перегружать высокой мощностью, они не работают на пиковых нагрузках и не выносят долгой пробуксовки в снегу или грязи. Поэтому такие трансмиссии не встретишь на грузовиках или спорткарах. Вдобавок вариаторы требуют бережливого обслуживания, в том числе частой замены хорошего масла. Зачастую они непригодны для ремонта, и по истечении срока службы — примерно 150 тысяч километров — вариатор меняют. А это недёшево из-за сложной конструкции.
Смотрите также:
чего не любят машины с роботами и вариаторами
Сегодня машин с различными типами автоматических коробок продается значительно больше, чем со старой доброй механикой. Что не удивительно – передвижение с автоматом куда комфортнее.
Давайте разберемся, какие у каждой коробки сильные и слабые стороны? И что предпочесть, исходя из условий эксплуатации? Правда, сразу оговоримся – производители обычно выбора не оставляют, предлагая для конкретной модели лишь один вид автомата. Реже два.
"Японцы" обычно оснащаются вариаторами, "немцы" – роботами. Все три типа у одной марки встречаются очень редко. На нашем рынке это, пожалуй, только KIA со своим бюджетным кроссовером Seltos.
Начнем с классического гидротрансформаторного агрегата. Это старая, проверенная и хорошо доработанная конструкция. Из чего следует надежность и ремонтопригодность. При должном обслуживании и не агрессивной манере езды можно пройти 200 и более тысяч километров без особых проблем. Позволяет автомат и в меру побуксовать. Недостатки тоже есть, но они не критичны.
"Минус автоматической коробки передач – это низкий КПД, что означает больший расход топлива перед другими типами трансмиссий, меньшая динамика автомобиля по сравнению с механической или роботизированной коробкой передач", – перечисляет промахи АКПП продавец-консультант Николай Андриянов.
Вариатор – очень распространенный сегодня тип АКПП, во многом благодаря плавному разгону: ведь передач, а значит и переключений нет. Второй плюс – топливная экономичность. Но есть и слабые стороны.
"Вариаторная коробка требует к себе больше внимания, нежели чем автоматическая. При эксплуатации машины в городе замена масла требуется раз на 40 тысяч километров", – подчеркивает мастер-консультант слесарного цеха Андрей Золотарев.
Такая трансмиссия чувствительна к перегреву и перегрузу, не любит пробуксовок и резких остановок, например, при парковке "в бордюр". И, наконец, робот. Плюсы – экономичность и хорошая динамика.
Слабое место роботов – гидравлическая часть и система управления. Ремонт может уже потребоваться через 100 тысяч километров, а "удовольствие" это не из дешевых.
Какой вариант трансмиссии предпочесть – решать вам. Любите погонять или часто выбираетесь на бездорожье, значит нужен классический автомат.
Для легковушки и моноприводного кроссовера, который передвигается только по городу, вполне сгодится вариатор.
Робот универсален, но его главный минус – спорная репутация, что отражается в том числе и на стоимости авто на вторичном рынке. Не все хотят рисковать.
Впрочем, надежность и долговечность любого варианта во многом зависит от нас. Агрессивная манера езды и обслуживание "спустя рукава" быстро выведут из строя даже самую надежную конструкцию.
Чем отличается робот от автомата 2022
Разница между роботом и машиной
ускорил темп современной жизни, требующей от нас мобильности. Чтобы добраться туда вовремя, многие люди покупают машину. Его покупка сопровождается рядом вопросов, первый из которых – выбор коробки передач. И тут у многих возникает проблема, что выбрать: машину или робота? В чем принципиальная разница между этими трансмиссиями?
Содержание статьи
- Сравните исполнение
- ВЫВОДЫ Topinfoweb.ком. EN
Сравнить
Автоматические коробки передач состоит из гидротрансформатора и редуктора. Преобразователь крутящего момента заменяет сцепление. Коробка передач содержит все пары зубчатых колес в постоянном зацеплении. Благодаря этому механизму автомат автоматически включает скорость без участия водителя в зависимости от оборотов двигателя. Это означает, что в данном случае электроника практически отсутствует.

Робот аналогичен механической коробке передач, но имеет блок управления, состоящий из гидравлических приводов и исполнительных механизмов.Они управляют работой сцепления и переключением скоростей. Переключение здесь происходит, как и в простой механике, только человеку не обязательно вмешиваться в этот процесс.
↑ вернуться к содержаниютехническое задание> Машина значительно упрощает управление транспортным средством, что значительно снижает утомляемость водителя, особенно в движении.Машина отличается плавным, мягким, практически незаметным переключением передач. К недостаткам устройства можно отнести большой расход топлива, особенно в городских условиях, и очень дорогой ремонт.
К преимуществам автоматизированной коробки передач относится высокий КПД. Таким образом, в отличие от машин, роботы позволяют без существенной потери крутящего момента передавать двигатель на ведущие колеса. Кроме того, робот прост в обслуживании, затраты на ремонт ничем не отличаются от ремонта ручного редуктора. Расход топлива соответствует параметрам механического поля, а в некоторых случаях, например в городском потоке, робот даже экономичнее. При этом расход масла у робота намного ниже, чем у автомата.
Робот позволяет переключать передачи вручную, чего нельзя сказать об устройстве. При этом робот медленно переключает передачи с частыми толчками и рывками. Роботизированная коробка передач - очень нестабильная трансмиссия. В одинаковых условиях, даже на двух одинаковых машинах, робот не будет работать одинаково.
к содержанию ↑
Заключение Разница. ruавтомат не имеет ничего общего с механической коробкой передач, а робот - это та же механика, но с блоком управления.
- Машина отличается мягким и плавным переключением передач. Робот переключает передачи медленно, довольно часто бывают рывки и рывки.
- Робот допускает ручное переключение в устройстве, в большинстве случаев он не предназначен для ручного переключения.
- Расход топлива и расход масла у роботизированных передач значительно ниже, чем у автомата.
- Ремонт роботов намного быстрее и дешевле, чем ремонт машин.
Чем отличается робот от автомата
Количество разновидностей автоматических коробок передач постоянно растет. Не так давно только и знали о существовании АКПП - стандартного варианта автомата с известным гидротрансформатором. Чуть позже в автомобили начали активно устанавливать бесступенчатые вариаторы, а не так давно стали популярны роботы для коробок. Сегодня мы рассмотрим, чем робот отличается от автомата в техническом и эксплуатационном плане, а также в чем преимущества и недостатки этих технологий.Сравнение двух разных типов коробок часто может предоставить ценную информацию при покупке разных машин.
В зависимости от ваших предпочтений по трансмиссии, вы можете уточнить выбор модели при покупке автомобиля на новом транспортном рынке. Поэтому к сравнению техники в боксах нужно относиться с пониманием дела. Лучше всего протестировать машины в разных технологиях, чтобы получить представление о возможностях и особенностях их работы.
Технические отличия робота от стандартной машины
Технически эти типы трансмиссий совершенно разные.Автоматическая коробка передач представляет собой конструкцию с гидротрансформатором, а также электроникой для управления поведением автомобиля. Преобразователь крутящего момента играет важную роль в этом наборе устройств, выполняя переключение передач в зависимости от числа оборотов. Эта функция позволяет стабильно работать с машиной и ожидать конкретной реакции.
Роботизированная коробка передач является механической и поэтому имеет ряд специфических преимуществ по сравнению с механической коробкой передач. Коробка более гибкая, имеет достаточно оригинальный набор различных функций и обеспечивает экономичную езду.Основные отличия робота от стандартной автобокса следующие:
- принцип работы надежной механической передачи, простота базовой конструкции;
- наличие большого количества электроники, управляющей сцеплением и переключением передач;
- возможность активного изменения типа проекта используется всеми мировыми производителями;
- экономия топлива за счет отсутствия перегрузки по газу и возможности раннего переключения передач;
- возможность быстро менять настройки коробки робота, придавая характер;
- производительность и современный дизайн, высокая надежность качественных узлов.
Конструкция стандартной АКПП тоже имеет некоторые преимущества. Такая коробка более надежна, не ломается и не требует дорогостоящего ремонта электроники. Конечно, гидротрансформатор не самый надежный технологический узел в автомобиле, но при правильном обращении он оказывается долговечным и служит не меньше двигателя.
Все эти особенности говорят о том, что машина с обычным автоматом и коробкой-роботом имеет свой характер.На самом деле разница в дизайне не единственная разница между ними. Ящики тоже обработаны с индивидуальными характеристиками и создают специфические ощущения в разных режимах движения.
Особенности практической эксплуатации робота и штатной АКПП
Роботизированная коробка не требует в работе никаких специальных функций. Сегодня многие уважающие себя концерны имеют фирменные роботы, а производители часто дают индивидуальные рекомендации по использованию агрегатов.Например, роботы DSG от Volkswagen рекомендуется использовать на пониженных скоростях без использования режима Sport.
Автоматизированная трансмиссия Ford PowerShift лучше всего работает на средних оборотах, повышая не только отзывчивость автомобиля, но и экономию топлива. Стандартная автоматическая коробка передач может справиться с множеством различных задач и условий. Особенности использования такого узла следующие:
- не разгоняйтесь слишком быстро - это приведет к повышенной нагрузке на АКПП;
- следует избегать буксировки других автомобилей и тяжелых прицепов - работа коробки подстраивается под вес автомобиля;
- при отсутствии нормального обслуживания в скором времени придется заменить целые узлы агрегата и прибегнуть к дорогостоящему ремонту; Неисправности гидротрансформатора
- часто не зависят от эксплуатации – иногда они появляются неожиданно;
- работа устройства достаточно стабильна, часто с задержкой реагирует на нажатие педали газа;
- Часто в автоматических системах предусмотрена возможность Kick-Down - экстренного сброса на пониженную скорость для быстрого разгона.
Учитывая довольно примитивную работу АКПП, система может быть достаточно раздражающей и недостаточно динамичной. Характер автомобиля с одним и тем же двигателем на механической коробке передач и традиционной автоматической коробке передач полностью изменится. Часто покупателей таких автомобилей искренне удивляет медленная и не очень динамичная поездка на очень мощных и объемных двигателях.
Однако стандартная автоматическая коробка передач традиционного типа защищает силовой агрегат от чрезмерного износа, поэтому двигатели с автоматической коробкой передач зачастую работают гораздо дольше, чем с механической коробкой передач или вариатором.А вот АКПП стоит дороже, так как ее все чаще можно увидеть в конструкции дорогого элитного автомобиля, а не в комплектации бюджетных машин. О преимуществах и недостатках редукторов разных типов смотрите в следующем видео:
Подведение итогов
Использование автоматических коробок передач становится все более актуальным в наше время, так как эта удобная функция позволяет уделять больше внимания дороге и получать максимум информации об окружающей среде.Также АКПП любого типа удобны в пробках, где приходится постоянно включать МКПП. Однако современная обрабатывающая промышленность отдает предпочтение более доступным комплектующим, таким как роботизированная коробка передач или вариатор.
Робот обходится производителю дешевле традиционной автоматики, а в эксплуатации до 200 000 км пробега по многим параметрам выглядит намного лучше конкурентов. Именно поэтому в последнее время так выросла популярность этого типа КПП.Есть ли у вас особые предпочтения в отношении использования определенного типа автоматической коробки передач?
.Как выбрать промышленного робота и какие процессы можно роботизировать? - Automatyka.pl
Роботизация — это возможность для вашего предприятия повысить эффективность и качество производства. Это также возможность улучшить условия труда и более эффективное управление коллективами сотрудников или способ устранения их нехватки.
Источник: https://pixabay.com/photo-2791671/
Использование роботов в компании также имеет неизмеримую пользу в виде оценки компании как современной и инновационной.
Желание роботизировать вызывает много вопросов:
- Выгодно ли это?
- Какой процесс можно роботизировать?
- Какие роботы доступны?
- Как выбрать промышленного робота?
- ... и многие другие.
Я постараюсь ответить на некоторые из них.
Согласно отчету Международной федерации робототехники, глобальные и польские тенденции продаж роботов показывают, что годовой рост мировых продаж роботов составил 30% в 2017 году и 16% в Польше.Однако на протяжении многих лет сохраняется восходящая тенденция. Возможности приобретения роботов в Польше должен способствовать факт изменения политики PIT и CIT, вступившей в силу 12 августа 2017 г. и касающейся ст. 22к абзац. 7 Закона о подоходном налоге и в ст. 16к Закона о КИТ - т.н. единовременная амортизация до суммы 100 000 злотых. Кроме того, так называемый мелкие налогоплательщики (с годовым доходом до 1,2 млн евро) могут воспользоваться возможностью единовременной амортизации в размере до 50 тыс. злотых. евро. Однако использование более высокого лимита уже является формой минимальной помощи и требует выполнения дополнительных требований.
Чем отличается манипулятор от промышленного робота
На практике часто можно встретить понятия манипулятор и промышленный робот взаимозаменяемые, но это два разных устройства. Основное отличие заключается в том, как они управляются. Манипуляторы управляются оператором, который воздействует непосредственно на манипулятор или опосредованно через панель управления, тем самым освобождая оператора от тяжелой работы. Промышленные роботы имеют собственную систему управления и не требуют присутствия оператора.Примером может служить выгрузка мешков с товаром: в случае с манипулятором оператор управляет всей рукой и захватом, а робот автоматически выгружает товар по программе, хранящейся в памяти. Итак, давайте сосредоточимся на промышленных роботах.
Основные параметры промышленных роботов
- Рабочее пространство — это пространство, в котором кончик манипулятора робота может достигать любой точки. Это пространство также описывается промежуточными значениями в виде максимального размаха руки по вертикали и горизонтали.Это один из основных параметров робота с точки зрения выбора для данного приложения.
- Скорость — максимальная рабочая скорость робота. Дается для вращающихся соединений в градусах в секунду; для прогрессивных суставов и конца руки в метрах в секунду.
- Допустимые моменты нагрузки манипулятора робота — это верхние предельные значения момента силы и момента инерции, воздействующие на отдельные элементы манипулятора робота.Следует помнить, что определение этого параметра оказывает существенное влияние на безопасность и правильную работу робота. Эти моменты должны определяться лицами, имеющими соответствующую квалификацию.
- Допустимая грузоподъемность — максимальный вес груза, который может нести робот. Однако следует помнить, что более важными параметрами являются допустимые моменты загрузки манипулятора робота.
- Количество степеней свободы робота это значение, которое позволяет определить мобильность робота и, следовательно, способность робота управлять кончиками рук
- Повторяемость — это мера распространения отклонений между позициями, достигаемая при достижении одной и той же позиции.
- Точность j est — это максимально допустимая разница между заданным положением и положением, достигаемым наконечником робота.
- Пустой вес робота и способ транспортировки .
- Способ монтажа : Роботы могут быть установлены на плоской поверхности, на платформе, на стене, на мобильной платформе, на рельсах и т.д.
- Параметры мощности и энергопотребления это значения, определяющие требования к тому, какие среды и какие параметры должны подаваться на робот.
- Условия окружающей среды , в которых может работать робот, определяют условия, в которых может работать робот, например, работа во взрывоопасной зоне Ɛх.
Рисунок 1: Разделение промышленных роботов по конструкции.
Несмотря на то, что квалификация дизайна довольно обширна, в настоящее время на рынке представлены только четыре дизайна: антропоморфный, SCARA, штатив (дельта) и декартовый.Эти конструкции создаются в результате двух основных соединений: поворотного (похожего на локтевой сустав) и поступательного (позволяющего изменять расстояние между членами робота).
- Антропоморфный робот, также известный как шарнирный робот, напоминает человеческую руку, поэтому имеет только вращательные соединения.
- SCARA, то есть робот с двумя вращающимися и одним поступательным соединениями, ценится за скорость работы и простую конструкцию. Штатив
- Delta — благодаря характерной конструкции и параллельному соединению плеч.Очень быстрый робот с высокой жесткостью и точностью движений, но с небольшим рабочим пространством.
- Декартовский робот с тремя прогрессивными элементами. В настоящее время мало известен из-за больших размеров и работы в пространстве прямоугольного параллелепипеда. Он хорошо работает при хранении крупных элементов.
Рисунок 2: Общая конструкция промышленного робота - антропоморфного, на базе титана KUKA KR 1000; 1) рука робота, 2) кабели, 3) шкаф управления, 4) панель оператора.
Рисунок 3: Базовые конструкции промышленных роботов, а) антропоморфный FANUC LR Mate 200iD; б) взаимодействующий FANUC CR-35iA, в) дельта FANUC M1iA, г) SCARA FANUC SR-3iA
Где использовать промышленного робота...
Есть только один правильный ответ: Это зависит от . Инвестиции в робота — довольно большие расходы. Без более глубокого анализа специфики компании, задач робота и направлений развития компании и ее продукции невозможно четко определить, стоит ли вкладывать средства в процесс роботизации в данном месте.Интеграционные компании, которые возглавят весь процесс или будут участвовать в нем, значительно облегчат этот процесс.
Чтобы увеличить шансы на правильное планирование проекта и выбор подходящего интегратора (даже на ранней стадии запланированных инвестиций), вы можете через autotyka.pl отправить запрос на проект роботизации в Группа компаний, специализирующихся в этой области. Эксперт портала поможет уточнить ваш запрос и подобрать для него подходящую группу получателей.Этот сервис бесплатный. После доставки запроса адресатам - поставщики готовят предложения и направляют их непосредственно составителю запроса.
Имея более широкий обзор предложений и дополнительную информацию об участниках торгов, автор запроса может оптимизировать свой выбор: не только с точки зрения цены, но и с точки зрения качества поставленного решения, сроков выполнения или других важных параметры проекта. Портал autotyka.pl за последние 12 месяцев обработал более 50 запросов на роботизацию таким образом.
Промышленные роботы используются в местах, где работа монотонна, обременительна и опасна. Вторая причина использования промышленных роботов заключается в том, что роботы быстрее, точнее и эффективнее. Благодаря роботизации также можно оптимально использовать сотрудников на заводе и давать им физически более легкие задачи, требующие изобретательности и использующие ценности данного сотрудника.
- Роботизированная сварка и сварка плавлением — здесь мы в основном видим шарнирных роботов на автомобильных заводах. Многие современные способы сварки требуют точного направления сварочного наконечника, что также связано с повышением качества сварных швов и эстетики соединения.
- Загрузка и разгрузка станков - все станки прессового производства, станки и обрабатывающие центры, термопластавтоматы и др. требуют размещения деталей в держателе.Эти детали часто бывают громоздкими или слишком тяжелыми.
- Палетирование и упаковка различные виды изделий, например картонные коробки, бутылки, конфеты и другие.
- Лакировка и покраска - Наибольшее преимущество роботизации отвлекает людей от работы во вредных условиях. Это также повышает качество покраски и снижает расход материалов. Однако следует помнить, что в таких зонах могут работать только роботы, предназначенные для работы во взрывоопасной среде.
- Нанесение клеев и пломб - использование в этих работах роботов снижает потери и обеспечивает повторяемость процесса, что значительно повышает качество и значительно снижает отходы материала.
Выбор промышленного робота
Анализируя покупку робота и его параметры, учитывайте дальнейшее развитие продуктов и линеек. Будущее может принести изменения существенных параметров элементов, с которыми он будет работать, а значит, и изменение требований к роботу.В случае инновационных решений следует оценивать вес инструмента, чтобы не перегружать робота.
Основным параметром при выборе робота является его грузоподъемность. Здесь следует отметить, что робот «несет» как поднимаемый им объект, так и инструмент, который позволяет это сделать, поэтому сам робот-инструмент может весить несколько или несколько килограммов.
Из-за движения робота грузоподъемность также следует рассматривать с точки зрения скорости движения, то есть допустимых моментов инерции. В маркетинговых целях производители нахваливают рабочие параметры предлагаемых роботов, но это всегда максимальные значения и очень редко робот с максимальной нагрузкой может работать с максимальной скоростью. Обычно для максимальной скорости это половина емкости, но это не обязательно так.
При рассмотрении вопроса о роботизации производственной линии следует также обратить внимание на эффективность машин, с которыми будет работать робот.Если он будет слишком медленным, это приведет к простою производства. Когда он слишком быстр - вы можете замедлить его движения и таким образом продлить ему жизнь. Роботизация — это также возможность интеграции машин с роботом путем создания системы диспетчерского управления и производства, что повышает ее гибкость.
Принимая решение о покупке робота, помните, что он является элементом производственной линии и не имеет сертификата СЕ.Следует помнить, что большая сила робота означает также большие и реальные угрозы жизни и здоровью сотрудников. Только дополнительное оборудование в виде систем безопасности и физических барьеров позволяет сертифицировать его и безопасно использовать в компании.
Будущее: коллаборативные роботы
В настоящее время производители роботов вводят новую группу — коллаборативные роботы. Это роботы, специально разработанные и предназначенные для работы с людьми. Помимо дополнительных систем безопасности, датчиков и режимов работы, даже их форма настолько продумана, чтобы обеспечить безопасность работающих с ним людей.Характерной особенностью этих роботов является также «дружественный» для оператора цвет, например, зеленый.
Вкратце...
Роботизация производства, как в мире, так и в Польше, постоянно развивается, также выходит на рынок малых и средних предприятий. Этому также способствуют правовые изменения в стране. Интеграционные компании набирают все больше опыта, что облегчает процесс роботизации.
Производители постоянно совершенствуют свою продукцию, делая роботов быстрее, безопаснее, сильнее, экономичнее, а их управление — более интуитивно понятным.
Роботизация растущей группы малых и средних предприятий — это само собой разумеющееся, но каждый такой шаг должен быть хорошо продуман и спланирован так, чтобы прибыль для компании и сотрудников была максимально высокой.
----
Об авторе: м Гр инж. Марек Виктор Шелерски – выпускник факультета электротехники Познанского политехнического университета в области автоматизации и робототехники, специализирующийся на автоматизации и промышленной электронике.В своей профессиональной деятельности я занимаюсь вопросами, связанными с ремонтом, модернизацией и проектированием систем промышленной автоматики, пневматики и механики, относящихся ко многим отраслям перерабатывающей и производственной промышленности. В частности меня интересует промышленная автоматизация, программирование систем управления, механика, металлообработка, конструирование машин и устройств. 90 123
.90 000 6 примеров использования промышленных роботов в автомобильной промышленностиАвтомобильная промышленность использует промышленных роботов уже более полувека. Поскольку General Motors впервые использовала UNIMATE в начале 1960-х годов. За это время количество роботов, используемых в секторе автоматизации, значительно выросло. Технологии также улучшились, и более дешевые, гибкие системы для совместной работы дополняют и заменяют громоздких и негибких традиционных роботов.
Использование роботов позволяет производителям автомобилей и автозапчастей ускорить производство, снизить затраты, повысить качество и защитить рабочих от травм.Коллаборативные роботы (или «коботы») открыли новые возможности для производителей автомобилей. В том числе возможность внедрения роботов в непосредственной близости от сотрудников без необходимости использования ограждений. Коботы позволяют производителям освободить своих работников от скучной, грязной и опасной работы. Кроме того, коботы доступны 24 часа в сутки, 7 дней в неделю, 365 дней в году.
Ниже мы рассмотрим шесть примеров применения коботов в автомобильной промышленности, но сначала...
Где используются промышленные роботы?
Существует несколько отраслей, в которых не выгодна автоматизация.С тех пор как первый автомобильный робот поступил на производственную линию GM, бесчисленное множество других заводов и складов внедрили роботизированную технику. Отрасли, использующие роботов, включают фармацевтику, общее производство, медицину и сельское хозяйство. Роботы-коботы Universal Robots — это универсальные платформы, которые можно использовать для решения самых разных задач в самых разных условиях. Единственными ограничениями являются грузоподъемность, соблюдение техники безопасности и ваше воображение.
Что делают промышленные роботы?
Промышленные роботы на производстве могут выполнять широкий круг задач.От погрузочно-разгрузочных работ, комплектования, укладки и проверки до сборки, упаковки, укладки на поддоны и отделки. Они предназначены для выполнения повторяющихся задач и избавления сотрудников от напряженной ручной работы. Роботы могут быть оснащены системами технического зрения и искусственным интеллектом, которые позволяют им реагировать на различные ситуации и обеспечивать обратную связь в режиме реального времени о работе системы.
Коботы в автомобилестроении
Одними из наиболее серьезных проблем, с которыми сталкиваются автомобильные сборочные линии, являются возможность получения травм, низкие темпы производства и проблемы с качеством конечной продукции.Эти проблемы можно решить, внедрив коботов.
Например, роботы UR10 используются компанией Ford в Румынии для смазки распределительных валов, заливки двигателей маслом и контроля качества.

Практически любую физическую задачу, связанную со сборкой автомобиля, могут выполнять роботы. У роботов также есть много возможностей для помощи в работе по принятию решений, включая, например, проверку качества «пройдено/не пройдено», чтобы убедиться, что конечный продукт имеет надлежащее качество.
Каковы 6 основных областей применения коботов в автомобилестроении?
Давайте рассмотрим несколько примеров коботов, используемых в автомобилестроении. Существует шесть основных видов использования. Это: сборка, покраска, сварка, эксплуатация станка, снятие и полировка материалов, контроль качества. До появления коботов производителям требовался отдельный робот для выполнения каждой из этих задач. Сегодня одна рука кобота Universal Robots может выполнять все эти задачи, просто собирая соответствующий концевой эффектор из платформы UR+.
Сборка
Коботы играют важную роль на многих автомобильных заводах, включая сборку. Коллаборативные роботы могут выполнять повторяющиеся задачи на производственной линии, например прикреплять дверные ручки и дворники. Они освобождают сотрудников от необходимости сосредотачиваться на более важных задачах. Коботы с большей полезной нагрузкой, такие как UR16e (грузоподъемность 16 кг / 35,3 фунта), способны перемещать более крупные и громоздкие предметы, такие как колеса, люки и кожухи двигателя.

Корпорация Lear использует гибких и легких коботов UR5 для сборки автомобильных сидений.UR5 имеет небольшую площадь основания (Ø 149 мм), что позволяет ему работать в ограниченном пространстве, где он может выполнять такие задачи, как помощь в сборке автомобильных сидений и каркасов салонов. В компании Lear станок UR5 выполняет завинчивание 8 500 раз в день, что позволило оптимизировать производственное время в компании. Компания Lear запустила своего первого кобота UR в 2017 году. Сегодня компания имеет 38 роботов UR на своем производственном предприятии в Китае, где они используются для затяжки болтов автомобильных сидений, проверки электрооборудования, захвата и установки и других важных процессов.
Покраска
Покраска стала основой производства роботизированных автомобилей. Роботы обеспечивают стабильную производительность окраски и круглосуточную доступность, с которой не может сравниться ни один рабочий. Кроме того, автомобильная краска токсична, что представляет серьезную опасность для рабочих. Такие задачи, как нанесение идеально ровного слоя краски на большую площадь, лучше всего выполняются роботами. Точность и эффективность, обеспечиваемые роботами при покраске, также со временем снижают производственные затраты благодаря меньшему количеству отходов краски и устранению человеческих ошибок.
Сварочные роботы
Сварка — еще одна опасная и трудоемкая задача, для которой идеально подходят коботы. Коботы могут выполнять дуговую, TIG, лазерную, MIG, ультразвуковую, плазменную и точечную сварку, а также пайку и распайку. Платформа UR+ предоставляет вам все аппаратное и программное обеспечение, необходимое для начала работы со сварочными приложениями в автомобильной промышленности.
Например, сварочная система Olympus UR — это недорогое решение для сварки, которое идеально подходит для производителей небольших автомобильных деталей.

Работа на станке
Работа на станке — это одна из тех задач, которые идеально подходят для автоматизации с помощью коллаборативных роботов. Скучные, часто грязные, а иногда и опасные, неудивительно, что в последние годы управление машинами стало одним из самых популярных применений коботов.

Индийская компания Bajaj Auto является одним из крупнейших в мире производителей мотоциклов и первой компанией в Индии, внедрившей коботов.С тех пор Bajaj Auto внедрила 100 коботов на своих производственных предприятиях. Они помогают рабочим управлять машинами и выполнять задачи по сборке. Компания стремилась улучшить стандартизацию своих двухколесных транспортных средств и увеличить скорость производства.
Роботы для удаления материала и полировки
Удаление материала и полировка деталей являются важными процессами в производстве автомобилей. Эти процессы включают очистку автомобильных деталей путем обрезки металла или полировки форм до гладкой поверхности.Как и многие задачи в автомобилестроении, эти задачи повторяются и иногда опасны, что создает идеальную возможность для вмешательства роботов. Задачи удаления материала включают шлифование, удаление заусенцев, фрезерование, шлифование, фрезерование и сверление.
Например, комплекты для окончательной обработки Robotiq представляют собой аппаратные и программные пакеты, которые предоставляют производителям все необходимое для начала работы с задачами по чистовой обработке поверхностей, шлифованию и чистовой обработке внешнего инструмента.В комплекты входит программное обеспечение Robotiq Finishing Copilot. Он предназначен для интуитивно понятного программирования отделочных приложений, независимо от уровня знаний конечного пользователя в области робототехники.
Роботы UR сконструированы таким образом, что они могут гибко взаимодействовать с сотрудниками. Таким образом, они идеально подходят для рабочих мест и производственных предприятий, где безопасность является приоритетом, а пространство в приоритете.
Контроль качества
Процессы контроля качества могут иметь решающее значение для успешного производства и дорогостоящих и длительных сбоев. Коботы используются в автомобильной промышленности для обеспечения качества продукции. UR+ предлагает широкий спектр аппаратного и программного обеспечения, специально разработанного для автоматизации задач контроля качества в автомобильной промышленности, включая оптический контроль и метрологию.
Индийский производитель автозапчастей Craft and Technik Industries (CATI) внедрил коботов для управления и эксплуатации станков с ЧПУ.Таким образом, увеличивается производство и снижается количество отказов со стороны клиентов до нуля. «Пришло время для малых и средних предприятий начать автоматизацию — роботы больше не являются привилегией только крупных предприятий», — сказал генеральный директор CATI Прашант Шантарам Умбрани. С момента внедрения коботов CATI добилась «безупречной» производственной среды и увеличения производства на 20%.

Компания Comprehensive Logistics, расположенная в Огайо, специализируется на сборке двигателей.Внедрение коллаборативного робота UR10, оснащенного видеокамерой, для помощи в выполнении инспекционных задач. Эта реализация позволила контрактному производителю из Огайо добиться 100% качества компонентов автомобильных двигателей.
Непрерывный рост автомобильного производства
Существует бесчисленное множество возможностей и применений роботов, в том числе коллаборативных роботов, используемых в автомобильной промышленности. Роботы обеспечивают более высокое качество, более короткое время производства и меньше несчастных случаев на производстве.
Коботы от Universal Robots пользуются популярностью среди производителей автомобилей благодаря их гибкости и адаптируемости. Коботы могут быть размещены в производственном цеху в непосредственной близости от сотрудников, без необходимости ограждения. Благодаря небольшому размеру и легкой мобильности производители автомобилей постоянно находят новые применения для своих коботов.
Если у вас есть вопросы о продуктах Universal Robots и преимуществах, которые они могут принести вашему бизнесу, обратитесь к ИТ-специалисту.автоматизация сегодня!
Статья переведена с сайта Universal Robots. Артикул: 6 примеров промышленных роботов в автомобильной промышленности.
.90 000 роботов займут более 30% рабочих мест через 10 лет - ComputerworldАналитики Gartner говорят, что в 2025 году треть существующих рабочих мест исчезнет, потому что людей заменят роботы, интеллектуальные машины или компьютерные программы.
Когда в мире появились первые роботы, многие думали, что они заменят человека только в определенных ситуациях или местах. Например, там, где высокие температуры, где нет воздуха или где загрязнена окружающая среда.Жизнь подтвердила это мнение, и сегодня мы знаем, что стоим на пороге настоящего вторжения роботов.
И это будут не простые роботы, подобные тем, что сейчас используются, например, японской компанией Tokyo Electric Power, которые обследуют внутренности реакторов на разрушенной АЭС Фукусима. Робот, разработанный и построенный Hitachi-GE Nuclear Energy и Международным научно-исследовательским институтом вывода из эксплуатации ядерных реакторов, недавно проник внутрь одного из поврежденных реакторов. Это будут совершенно другие сверхразумные роботы.Это убеждение подтверждают и инженеры, работающие в Google, которые утверждают, что через пятнадцать лет роботы будут такими же интеллектуальными, как люди.
См. также:
Поэтому неудивительно, что многие люди боятся будущего, в котором будет очень сложно найти работу, ведь роботы заменят людей на фабриках, в магазинах или офисах. Их беспокойство представляется вполне оправданным с учетом, например, прогнозов аналитической компании Gartner.К 2025 году, по ее словам, треть существующих рабочих мест исчезнет, а людей заменят роботы или компьютерное программное обеспечение.
Интересно, что, согласно анализам Gartner, роботы потихоньку начинают угрожать не только так называемым «синие воротнички», т. е. люди, выполняющие физическую работу, а также «белые воротнички», т. е. люди, выполняющие умственную работу, а также менеджеры и в широком смысле управленческий персонал. Например, финансисты, аналитики или даже хирурги или анестезиологи должны чувствовать угрозу — их тоже все чаще заменяют роботами.
Робот Baxter, разработанный Rethink Robotics
Нашествие роботов кардинально изменит рынок труда. Многие специальности и профессии просто исчезнут, но появятся совершенно новые и неизвестные профессии и услуги. Нас ждет своего рода промышленная революция, по масштабам и влиянию на общество подобная той, с которой столкнулись наши предки, когда появились паровые машины и электричество.
Аналитики даже изобрели новый английский термин для второго века машин, ссылаясь на то, что произошло 200 лет назад. Но разница между этими «промышленными революциями» принципиальна. Двести лет назад людям пришлось осознать, что их мускулы можно с успехом заменить машинами, получающими энергию от паровых или электрических двигателей. Теперь мы должны начать потихоньку привыкать к тому, что серые клетки (т.е. интеллект) тоже могут начать заменяться роботами и компьютерами.
Кроме того, промышленная революция, начатая двести лет назад, начала относительно быстро создавать новые рабочие места. Мир быстро ускорился, и уровень безработицы начал резко падать. Аналитики опасаются, что в случае Второй революции машинного века этот сценарий больше не повторится, рабочих мест больше не будет, а масштабы безработицы возрастут, что вызовет социальную напряженность. Пока можно только догадываться о масштабах этого явления.
В качестве утешения специалисты по искусственному интеллекту говорят, что в обозримом будущем роботы не смогут выражать все эмоции, сопровождающие человека.Речь идет, например, о чувстве юмора, сарказме, гневе, радости и т. д. Кроме того, не следует ожидать, что роботы навсегда устранят всех сотрудников из офисов, заводов или контор, поскольку в задачах, требующих творческого мышления, оценки ситуации или взаимодействуя с людьми им трудно, они будут конкурировать с человеком.
Однако остается вопрос, не приобретут ли, например, через сто лет роботы и эти человеческие качества. А потом ...... но именно об этом будут беспокоиться будущие поколения.
.| Предлагаемые темы ИНЖЕНЕРНЫХ работ | Промоутер |
|---|---|
| Разработка генератора многоточечных траекторий робота и методов их визуализации
| Доктор хаб.Марек Войтыра 9000 4 Доктор Лукаш Волински |
| Использование робота FANUC для управления мощностью с помощью системы технического зрения (ЗАРЕЗЕРВИРОВАНО)
| Д-р Марчин Пенкал |
| Использование среды моделирования ROBOGUIDE для управления роботом FANUC (ЗАРЕЗЕРВИРОВАНО)
| |
| Конструкция датчика температуры с хранением измерений и беспроводной передачей результатов по Bluetooth (ЗАРЕЗЕРВИРОВАН)
| |
| Динамический анализ промышленного робота в среде Matlab с использованием Robotics System Toolbox
| |
| РЕКОНСТРУКЦИЯ ПОСЛЕДСТВИЯ ДОРОЖНОГО ПРОИСШЕСТВИЯ Магистерская или амбициозная инженерная диссертация, общая для 2 человек, с возможностью выделения 2 независимых (или 3 в случае инженерной диссертации) отдельных тем Междисциплинарная экспертиза ДТП (лобовое смещение/косой удар D v прим.80 км/ч), в котором были осуществлены следующие смерти: ребенок 3,5 лет в одной машине; водитель (пожилой мужчина) второй машины; мать ребенка (за рулем первой машины) серьезных травм во время аварии не получила. Общая часть:
Студент 1:
Студент 2:
| Доктор хаб. Цезарий Ржимковски |
| РАЗРАБОТКА ГЕОМЕТРИЧЕСКИ-МАССОВОЙ (3-D) МОДЕЛИ ТЕЛА ЧЕЛОВЕКА НА БАЗЕ VHP Магистерская или амбициозная инженерная диссертация (для 1 человека) Определение геометрических параметров (размеров и объемов), а затем масс, расположения центров масс и главных моментов инерции отдельных сегментов, составляющих модель человеческого тела. В основу будут положены данные экспериментального исследования (серия фотографий, на которых показаны сечения тела в поперечной плоскости через каждый 1 мм), предоставленные лицом, проводящим исследование, из базы данных, разработанной в рамках проекта «Видимый человек». Проект» и литературные данные о плотности отдельных тканей тела человека. | |
| Разработка предложений по поглощению энергии при контакте самолета с землей
Тема, которую можно расширить до диссертации. | |
| Анализ опасностей и методы их снижения при ДТП с участием беременных 90 028 90 029
Тема, которую можно расширить до диссертации. | |
| Взаимодействие контроллеров ПЛК в локальной сети:
| Доктор Анджей Хмельняк |
| Проектирование и реализация микропроцессорной системы управления:
| |
| Разработка и реализация мобильного робота собственной разработки:
| |
| Управление движением робота Seekur Jr с помощью мобильного устройства:
| |
| Управление роботом-манипулятором Seekur Jr с мобильного устройства:
| |
| Задача поиска и захвата объекта роботом Seekur Jr, оснащенным манипулятором:
| |
| Семантическая сегментация людей и частей тела на изображениях.
| Доктор Анджей Кордецкий |
| Видео парковочные системы для автомобилей.
| |
| Удаленная игра в шахматы
| |
| Снижение вычислительной сложности методов обнаружения объектов на изображениях
| |
| Калибровка оптических искажений камеры:
| |
| Имитационное исследование влияния неопределенности на работу системы управления, спроектированной методом линеаризующей обратной связи (опубликованная тема)
Рекомендуется знание английского языка, позволяющее свободно читать специализированную литературу. | Доктор Адам Возняк |
| Концептуальные проекты, связанные с системами безопасности для детей, перевозимых в легковых автомобилях с потенциалом реализации (завершено патентной заявкой).
| Доктор Эдита Рола |
| Моделирование физиологии человека: модель динамики мышц .
| |
| Анализ реальных биоэлектрических сигналов в среде Matlab.
| |
| Эндокринная система как система регуляции, обеспечивающая приспособление к изменяющимся условиям внешней и внутренней среды.
| |
| Физиологическая модель работы сердца.
| |
| Целостная, биомеханическая модель человеческого организма - синтез работы отдельных систем.
| |
| Прочностные расчеты в среде ANSYS Workbench
| |
| Проблемы в области биомеханики столкновения | |
| Анализ динамических систем с управлением в среде Адамса - Matlab/Simulink
| Д-р Марек Шуровец |
| Анализ поведения биомеханических моделей человека при взаимодействии с внешней средой с использованием среды OpenSim
| |
| Измерение и анализ поведения динамических систем с использованием платформ CompactRIO или PXI в среде LabView
| |
| Оптимальное управление планарным манипулятором с использованием итеративного контроллера iLQR)
| Доктор хаб. Павел Мальчик |
| Оптимальное планирование движения робота с использованием методов прямой транскрипции
| |
| Предлагаемые темы для магистерских диссертаций | Промоутер |
| Анализ роботов с деформируемыми элементами многоэлементным методом в среде ANSYS и MSC NASTRAN
| проф. Януш Фрончек |
| Алгоритм анализа замкнутых кинематических цепей с использованием параллельных вычислений
| |
| Оценка эффективности контактного моделирования с использованием жестких многозвенных систем по сравнению с моделированием методом конечных элементов
| |
| РЕКОНСТРУКЦИЯ ПОСЛЕДСТВИЯ ДОРОЖНОГО ПРОИСШЕСТВИЯ Магистерская или амбициозная инженерная диссертация, общая для 2 человек, с возможностью выделения 2 независимых (или 3 в случае инженерной диссертации) отдельных тем Междисциплинарная экспертиза ДТП (лобовое смещение/косой удар D v прим.80 км/ч), в котором были осуществлены следующие смерти: ребенок 3,5 лет в одной машине; водитель (пожилой мужчина) второй машины; мать ребенка (за рулем первой машины) серьезных травм во время аварии не получила. Общая часть:
Студент 1:
Студент 2:
| Доктор хаб. Цезарий Ржимковски |
| РАЗРАБОТКА ГЕОМЕТРИЧЕСКИ-МАССОВОЙ (3-D) МОДЕЛИ ТЕЛА ЧЕЛОВЕКА НА БАЗЕ VHP Магистерская или амбициозная инженерная диссертация (для 1 человека) Определение геометрических параметров (размеров и объемов), а затем масс, расположения центров масс и главных моментов инерции отдельных сегментов, составляющих модель человеческого тела. В основу будут положены данные экспериментального исследования (серия фотографий, на которых показаны сечения тела в поперечной плоскости через каждый 1 мм), предоставленные лицом, проводящим исследование, из базы данных, разработанной в рамках проекта «Видимый человек». Проект» и литературные данные о плотности отдельных тканей тела человека. | |
| Разработка предложений по поглощению энергии при контакте самолета с землей
| |
| Анализ опасностей и методы их снижения при ДТП с участием беременных 90 028 90 029
| |
| Доктор Анджей Хмельняк | |
| Отслеживание положения людей в видеофрагментах
| Доктор Анджей Кордецкий |
| Менять местами лица в видеофрагментах
| |
| Проектирование и реализация системы стабилизации мяча на наклонной плоскости (опубликованная тема)
| Доктор хаб. Павел Мальчик |
| Оптимальное планирование движения робота с использованием методов прямой транскрипции
| |
| Сравнение реакции имитационной модели двигателя постоянного тока с реальной системой (ЗАРЕЗЕРВИРОВАНО)
| Д-р Марчин Пенкал |
| Подбор благоприятных параметров имплантата межпозвонкового диска.
| Доктор Эдита Рола |
| Численная модель переломов бедра как альтернатива дорогостоящим и трудоемким исследованиям in vivo и экспериментальным исследованиям in vitro.
| |
| Моделирование физиологии человека: модель сердечно-сосудистой системы.
| |
| Приглашаем на индивидуальные консультации к сотрудникам ЗТМиР | |
Агнешка Пилат уехала из Лодзи, спасаясь от неудачных отношений. Она оказалась в Сан-Франциско, потому что верила, что сможет осуществить свои мечты за океаном. Ей и в голову не приходило, что, решив учиться у классического портретиста, она станет машинным портретистом. Познакомьтесь с его историей.
Роботы все смелее входят в мир культуры. Агнешка Пилат, которая изначально специализировалась на классических портретах, прекрасно это знает.
- На самом деле в портретах мы показываем, кто наиболее культурно важен и кто действительно правит миром. На данный момент самое главное либо станки, либо технологии . Я подумал, что это исторический момент, когда нужно их покрасить. Чтобы в будущем дать этим портретам место в музеях, - пояснил художник.
Агнешка Пилат учит роботов рисовать
Изначально она рисовала старые машины - с историей. Лишь позже она начала создавать портреты современных роботов.Однако эта задача оказалась не самой легкой. Гугл узнал об этом.
- Я должен был нарисовать портрет механического устройства, которое стоит на машине. (...) Это было очень долгое исследование для меня. Я был там около двух месяцев. Мне пришлось вернуться в свою студию, и мне было очень жаль и стыдно, но я не смог ее закончить, - признался художник.
Сегодня ее картины покупают богатые из Кремниевой долины, а Агнешка Пилат подружилась с роботом из Boston Dynamics, которого хочет научить рисовать.Художник планирует сделать первую в мире выставку «Женщина и робот».
- Будут картины, нарисованные мной, а также картины, нарисованные роботом, - объявила она. Подробнее о ее работе в видео.
Вы не смотрели Dzień Dobry TVN в прямом эфире? Полные эпизоды можно найти на Player.pl
В «Канаповцах» Камиль и Куба похудели в общей сложности более чем на 40 кг. «Поначалу пробежать 100 метров было рутиной»
Три вещи, которые вы можете сделать утром, чтобы сделать свой день успешным
Победитель 2.выпуск «МастерШеф» в качестве специального гостя на «МастерШеф Юниор». Как сложилась ее карьера?
Автор: Доминика Чернишевская
Докладчик: Михал Малиновский
.