Приводной двигатель это
приводной двигатель - это... Что такое приводной двигатель?
- приводной грейфер
- приводной канат
Смотреть что такое "приводной двигатель" в других словарях:
приводной двигатель — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN drive motordriving motoractuating mechanism … Справочник технического переводчика
приводной двигатель — pavaros variklis statusas T sritis automatika atitikmenys: angl. drive motor; driving motor vok. Antriebsmotor, m rus. приводной двигатель, m pranc. moteur de commande, m; moteur d entraînement, m … Automatikos terminų žodynas
приводной двигатель глубинного насоса — — [http://slovarionline.ru/anglo russkiy slovar neftegazovoy promyishlennosti/] Тематики нефтегазовая промышленность EN pumping power … Справочник технического переводчика
ДВИГАТЕЛЬ — • ДВИГАТЕЛЬ (мотор), механизм, преобразующий энергию (такую как тепло или электричество) в полезную работу. Термин «мотор» иногда применяется к ДВИГАТЕЛЮ ВНУТРЕННЕГО СГОРАНИЯ (который преобразует тепло, вырабатываемое горящими газами, в возвратно … Научно-технический энциклопедический словарь
Двигатель со встречным движением поршней — Дизель 2Д100 со встречным движением поршней, использовался на тепловозах ТЭ3 … Википедия
Двигатель Toyota JZ — Линейка двигателей Toyota JZ это серия бензиновых автомобильных рядных шестицилиндровых двигателей, которая пришла на замену линейке M. Все двигатели серии имеют газораспределительный механизм DOHC с 4 клапанами на цилиндр, объём двигателей: 2.5… … Википедия
Паровой двигатель — Паровая машина тепловой двигатель внешнего сгорания, преобразующий энергию нагретого пара в механическую работу возвратно поступательного движения поршня, а затем во вращательное движение вала. В более широком смысле паровая машина любой… … Википедия
М-103 (двигатель) — Для этой статьи не заполнен шаблон карточка {{Поршневой авиадвигатель}}. Вы можете помочь проекту, добавив его … Википедия
М-107 (двигатель) — М 107 (ВК 107) Д … Википедия
М-100 (двигатель) — М 100 Производитель: завод №26 (Рыбинск) Годы производства: 1935 1940 Тип: 12 цилиндровый, рядный, V образный, карбюраторный Технические характеристики Объём: 36,03 л Ход поршня: 170 мм Количество цилиндров: 12 Диаметр цилиндров: 150 мм… … Википедия
М-63 (двигатель) — М 63 Производитель: Завод № 19 (Пермь) Годы производства: 1939 1940 Тип: 9 ти цилиндровый звездообразный, воздушного охлаждения Технические характеристики Объём: 29,87 л Ход поршня: 174,5 мм Диаметр цилиндров: 155,5 мм Компрессор: одноступенчатый … Википедия
Разница между пневматическими, гидравлическими и электрическими приводами
Линейные привода предназначены для приведения в движение частей машин и механизмов по линейному поступательному движению. Привода преобразуют электрическую, гидравлическую энергию или энергию сжатого газа в движение или силу. В этой статье представлен анализ линейных приводов, их преимуществ и недостатков.
Как работают линейные привода
Линейные электрические привода преобразуют электрическую энергию в механическую. В качестве двигателя в них используется либо вращающийся либо линейный электрический двигатель. Вращающийся электрический двигатель перемещает шток посредством механического преобразователя, например с помощью шарико-винтовой или ролико-винтовой пары.
Пневматические и гидравлические привода фактически являются механическими преобразователями и представляют собой своего рода вставку (пневматическую или гидравлическую) между двигателем и исполнительным органом.
Пневматические линейные привода имеют поршень внутри полого цилиндра. Давление от внешнего компрессора или ручного насоса перемещает поршень внутри цилиндра. При увеличении давления поршень перемещается по оси, создавая линейную силу. Поршень возвращается в свое начальное положение посредством пружины или сжатого газа подаваемого с другой стороны поршня.
Гидравлические линейные привода работают подобно пневматическим приводам, но практически несжимаемая жидкость подаваемая насосом лучше перемещает шток, чем сжатый воздух.
Преимущества
Электрические привода обладают высокой точностью позиционирования. Для примера точность может достигать 8 мкм с повторяемостью не хуже 1 мкм [1]. Настройки привода масштабируемы для любых целей и требующихся усилий.
Электрические привода могут быть быстро подключены к системе. Диагностическая информация доступна в режиме реального времени.
Обеспечивается полное управление параметрами движения. Могут включать энкодеры для контроля скорости, положения, момента и приложенных сил.
Электрические привода тише гидравлических и пневматических.
В связи с отсутствием жидкостей отсутствует риск загрязнения окружающей среды.
Недостатки
Начальная стоимость электрических приводов выше чем пневматических и гидравлических.
В отличие от пневматических приводов электрические привода (без дополнительных средств) не подходят для применения во взрывоопасных местах.
При продолжительной работе электродвигатель может перегреваться, увеличивая износ редуктора. Электродвигатель может также иметь большие размеры, что может привести к трудностям установки.
Сила электропривода, допустимые осевые нагрузки и скоростные параметры электропривода определяются выбранным электродвигателем. При изменении заданных параметров необходимо менять электродвигатель.

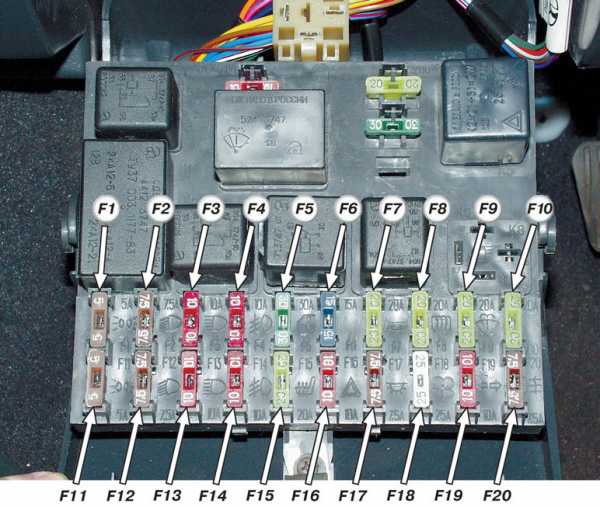
Линейный электропривод, включающий вращающийся электродвигатель и механический преобразователь
Преимущества
Простота и экономичность. Большинство пневматических алюминиевых приводов имеют максимальное давление до 1 МПа с рабочим диаметром цилиндра от 12,5 до 200 мм, что приблизительно соответствует силе в 133 - 33000 Н. Стальные пневматические привода обычно имеют максимальное давление до 1,7 МПа с рабочим диаметром цилиндра от 12,5 до 350 мм и создают силу от 220 до 171000 Н [1].
Пневматические привода позволяют точно управлять перемещением обеспечивая точность в пределах 2,5 мм и повторяемость в пределах 0,25 мм.
Пневматические привода могут применяться в районах с экстремальными температурами. Стандартный диапазон температур от -40 до 120 ˚C. В плане безопасности использование воздуха в пневматических приводах избавляет от необходимости использования опасных материалов. Данные привода удовлетворяют требованиям взрывозащищенности и безопасности, так как они не создают магнитного поля, в связи с отсутствием электродвигателя.
В последние годы в области пневматики достигнуты успехи в миниатюризации, материалах и интеграции с электроникой. Стоимость пневматических приводов низкая в сравнении с другими приводами. Пневматические привода имеют маленький вес, требуют минимального обслуживания и имеют надежные компоненты.
Недостатки
Потеря давления и сжимаемость воздуха делает пневматические привода менее эффективными, чем другие способы создания линейного перемещения. Ограничения компрессора и системы подачи значит, что работа на низком давлении приведет к маленьким силам и скоростям. Компрессор должен работать все время даже если привода ничего не перемещают.
Для действительно эффективной работы пневматические привода должны иметь определенные размеры для каждой задачи. Из-за этого они не могут использоваться для других задач. Точное управление и эффективность требуют распределители и вентили соответствующего размера для каждого случая, что увеличивает стоимость и сложность.
Несмотря на то, что воздух легко доступен, он может быть загрязнен маслом или смазкой, что приводит к простою и необходимости в обслуживание.
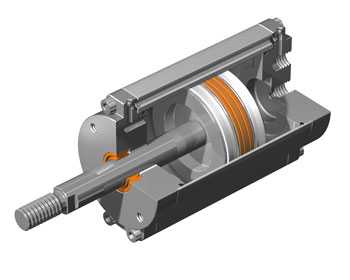
Цилиндр пневматического привода
Преимущества
Гидравлические привода подходят для задач требующих большие силы. Они могут создавать силу в 25 раз больше чем пневматические привода того же размера. Они работают при давлениях до 27 МПа.
Гидравлические двигатели имеют высокий показатель мощность на объем.
Гидравлические привода могут держать силу и момент постоянным без подачи насосом дополнительной жидкости или давления, так как жидкости в отличии от газа практически не сжимаются.
Гидравлические привода могут располагаться на значительном расстоянии от насосов и двигателей с минимальной потерей мощности.
Недостатки
Подобно пневматическим приводам потеря жидкости в гидравлических приводах приводит к меньшей эффективности. Помимо этого утечка жидкости приводит к загрязнениям и потенциальным повреждениям рядом расположенных компонентов.
Гидравлические привода требуют много сопровождающих компонентов, включающих резервуар для жидкости, двигатели, насосы, стравливающий клапан, теплообменник и др. В связи с чем такие привода сложно разместить.

Цилиндр гидравлического привода
NORD - Электродвигатели NORD DRIVEYSTEMS
Электродвигатели
Большая мощность, маленький расход
NORD поставляет широкий спектр электродвигателей, которые отвечают всем принятым мировым требованиям и стандартам эффективности. Наши двигатели находят применение в многочисленных приложениях, потому что они не только мощные и прочные, но и комбинируются со всеми редукторами NORD.
Будь то в мешалках, конвейерных системах, внутрипроизводственной логистике или пищевой промышленности, электродвигатели NORD можно найти везде, где требуется высокая мощность. Они работают надежно и с очень высоким КПД (до 95 процентов) на протяжении многих лет. Это позволяет нашим клиентам экономить на эксплуатационных расходах и одновременно сохраняет окружающую среду.
Доводы в пользу покупки электродвигателей NORD:
- Максимальная эффективность
Наши электродвигатели соответствуют требованиям действующего стандарта IEC 60034-30-1: 2014 и EUP 640/2009, а экономичные синхронные двигатели – даже самому высокому классу эффективности IE4. - Лучшее качество
Мы производим все двигатели на собственном производстве в соответствии со строгими стандартами. - Высокая эксплуатационная готовность
Благодаря нашему собственному производству мы можем доставить все наши электродвигатели за короткое время по всему миру. - Высокая гибкость
Благодаря одинаковым размерам двигателей вы можете легко переходить с одного класса энергоэффективности на следующий, без необходимости проведения механической регулировки.
Экономичные и сильные: наши электродвигатели
Электрические приводы в промышленных применениях расходуют до 70 процентов от общей потребляемой энергии. Для многих компаний здесь открывается большой потенциал для оптимизации.
Поэтому мы в NORD разработали серию мощных энергосберегающих двигателей. Эти одиночные двигатели характеризуются очень высоким КПД и иногда значительно эффективнее, чем это требует актуальное постановление ЕС.
Энергоэффективные электродвигатели NORD подходят практически для любого применения. Самая экономичная серия IE4 выпускается в трех типоразмерах с мощностью от 1,1 до 5,5 кВт.
Вы хотите значительно сократить свои затраты на энергию? Тогда получите информацию о наших энергоэффективных синхронных двигателях IE4 прямо сейчас!
Нажмите здесь
Электродвигатели для особых областей применения
В некоторых областях применения стандартные двигатели не могут быть использованы, например, потому что условия окружающей среды слишком суровы, транспортируемые грузы слишком тяжелые или существует опасность взрыва.
Для таких случаев в нашем ассортименте есть специальные двигатели в диапазоне мощности от 0,12 до 30 кВт: взрывозащищенные версии доступны в вариантах для использования в пылевой атмосфере и в газовой атмосфере. Наши двигатели сертифицированы в соответствии с требованиями ATEX, IECEx и HazLoc. Посмотрите, как ведут себя наши одиночные двигатели в сложнейших условиях на сталелитейном заводе!
Посмотреть видео
Как правильно выбрать электрический двигатель
Перед промышленностью все чаще встает вопрос энергоэффективности. Более экологичная экономика является одной из целей Конференции по климату в Париже (COP21), на достижение которой ориентированы многие страны. Для ограничения потребления и экономии энергии в последние годы в промышленность внедряется все более энергоэффективное оборудование. Согласно исследованию Европейской Комиссии, на долю двигателей приходится 65% промышленного потребления энергии в Европе. Работа над двигателями является важным рычагом сокращения выбросов CO2. Еврокомиссия даже прогнозирует, что к 2020 году можно повысить энергоэффективность двигателей европейского производства на 20-30%. В результате выбросы CO2 в атмосферу сократились бы на 63 млн. тонн, а экономия составила бы 135 миллиардов кВтч.
Если вы хотите использовать в своей деятельности энергоэффективные двигатели и внести свой вклад в энергосбережение и развитие планеты, вам необходимо изучить в первую очередь стандарты энергоэффективности двигателей, действующие в вашей стране или в вашем географическом регионе. Но будьте внимательны, эти стандарты применимы не ко всем двигателям, а только к асинхронным двигателям AC.
Международные нормы
- Международная электротехническая комиссия (IEC) определила классы энергоэффективности для электродвигателей, представленных на рынке, известные как код IE, которые обобщены в международном стандарте IEC.
- IEC определила четыре уровня энергоэффективности, которые характеризуют энергоэффективность двигателя:
- IE1 — стандартный класс
- IE2 — высокий класс
- IE3 — премиум класс
- IE4 — супер-премиум класс
- IEC также внедрила стандарт IEC 60034-2-1:2014 для испытаний двигателей. Многие страны используют национальные стандарты для испытаний двигателей, но в то же время применяют международный стандарт IEC 60034-2-1.
В Европе
ЕС уже принял ряд директив, направленных на снижение энергопотребления двигателей, включая обязательство производителей выводить на рынок энергоэффективные двигатели:
- C 2011 года класс IE2 обязателен для всех двигателей.
- Класс IE3 обязателен с января 2015 года для двигателей мощностью от 7,5 до 375 кВт (или IE2, если эти двигатели оснащены преобразователем частоты).
- Класс IE3 обязателен с января 2017 года для двигателей мощностью от 0,75 до 375 кВт.
В США
В Соединенных Штатах в силе остаются стандарты, определяемые Американской ассоциацией NEMA (Национальная ассоциация производителей электрооборудования). С 2007 года минимальный требуемый уровень установлен на уровне IE2.
Эта же классификация используется в Австралии и в Новой Зеландии.
В Азии
В Китае корейские стандарты MEPS (Minimum Energy Performance Standard) применяются для малых и средних трехфазных асинхронных двигателей с 2002 года (GB 18693). В 2012 году стандарты MEPS были приведены в соответствие со стандартами IEC, переходя от IE1 к IE2, а теперь и к IE3.
Японияпривела в соответствие свое национальное законодательство с классами эффективности IEC и включила в 2014 году в программу «Top Runner» электродвигатели уровней IE2 и IE3. Действующая с 1998 года программа Top Runner обязывает японских автопроизводителей выставлять на рынок новые модели, которые более энергоэффективны, чем предыдущие поколения, заставляя тем самым внедрять инновации в энергетику.
В Индии используется сравнительная оценка эффективности с 2009 года и национальный стандарт на уровне IE2 с 2012 года.
Мощность приводного двигателя - Справочник химика 21
Размер экструзионной головки и охлаждающая способность установки являются важными параметрами при выборе экструдера. Производительность головки и мощность приводного двигателя, которые зависят от различных размерных показателей экструдера, можно рассчитать. Некоторые характерные значения приведены в табл. 2.3 и 2.4 соответственно. [c.62]
Где 0,80—0,85 — поправочный множитель, учитывающий потери мощности в мультипликаторе и подшипниках М, ах — максимальная при заданной частоте вращения мощность приводного двигателя, кВт Ро — площадь входного сечения рабочего колеса, м=. [c.133]
Мощность приводного двигателя больше мощности М, затрачиваемой на перемешивание, из-за потерь энергии в механической передаче и сальнике и определяется по формуле [c.30]
Мощность приводного двигателя выбирают на основе приведенной выше формулы, но с учетом возможного отклонения режима работы насоса от его номинального (паспортного) режима. Чтобы не перегружать двигатель при любых режимах, его мощность выбирают с запасом = где k=, —1,5 (запас тем больше, чем меньше N). [c.56]
Всасывающая полость не заполнена, недостаточная мощность приводного двигателя Открыть крышку всасывания, вставить предохранительную призматическую шпонку [c.100]
Сделана ссылка на опыт самоизмельчения в Южной Африке. Эти мельницы используют в качестве мелющих тел отобранные куски руды необходимого размера для того, чтобы измельчить руду, раздробленную предварительно до размеров, подходящих для питания обычных барабанных мельниц. По рабочим характеристикам такой режим несколько отличается от работы обычных галечных мельниц. Сделана ссылка на мельницы Аэрофол в Мангуле. Эти мельницы получают исходный материал в виде несортированной руды, которая может подвергаться самоизмельчению. В этом случае применяют дополнительно стальные мелющие 1ела, так как иначе мельницы не могли бы полностью использовать мощность приводных двигателей. Добавка небольшого количества стальных шаров не всегда улучшает эффективность размола. [c.375]
Мощность приводного двигателя N кет [c.242]
Мощность приводного двигателя N может быть больше величины N ввиду потерь энергии в механической передаче и сальнике (если аппарат для перемешивания снабжается такими устройствами). [c.165]
Мощность приводного двигателя, кВт 3.3/4.I 1.7 1.0 [c.112]
Определение мощности на валу компрессора производится путем измерений потребляемой мощности приводного двигателя или крутящего момента. [c.75]
Размер экструдера . ..................... — . ........ Номинальная мощность приводного двигателя [c.62]
Мощность, подводимую к насосу при помощи муфты или ременной передачи, называемую мощностью насоса, определяют косвенным или прямым замером, а именно по измеренным величинам крутящего момента на валу насоса и частоте вращения или по измеренной величине мощности приводного двигателя с исключением всех потерь, которые имеют место между точкой замера и валом насоса, [c.163]
Сальниковое уплотнение отличается простотой и дешевизной конструкции, возможностью регулировки утечки без остановки насоса, возможностью замены пакета набивки без разборки насоса и минимальными осевыми габаритными размерами узла. Однако оно недолговечно, требует постоянного ухода и потребляет часть мощности приводного двигателя. [c.34]
Мощность приводного двигателя, кВт. ..........2,3 [c.150]
Установочная мощность приводного двигателя определяется но-формуле [c.233]
Размеры оборудования, применяемого для производства пленок, могут быть самыми различными. Так, рукавную пленку небольшой ширины изготовляют на экструдере с мощностью приводного двигателя 5—18 кет (диаметр цилиндра 50,8—63,5 мм), а пленку большого размера — на экструдерах с мощностью двигателя 30—150 кет (диаметр цилиндра 88,9— 203,2 мм). Производительность агрегата зависит от соотношения скоростей охлаждения и приемки пленки. При производстве тонких пленок небольшой ширины нецелесообразно применять мощный экструдер, так как при высоких скоростях, создаваемых в этой машине, пленка не успеет охладиться. [c.104]
Из-за потерь энергии на клапане 8 КПД описанной установки невысок, поэтому ее рационально применять при небольших мощностях приводного двигателя. [c.46]
Далее принимаем, что мощность приводного двигателя имеет значительный запас против тяговой мощности, которую приводные барабаны могут передавать на ленту конвейера. Это соответствует фактическому положению, так как приводные электродвигатели в нормальных условиях допускают значительную перегрузку, величина которой определяется характеристикой электродвигателя. [c.97]
Чтобы определить мощность приводного двигателя насоса поступают следующим образом. [c.171]
Мощность приводного двигателя [c.172]
Рис, 7. Зависимость стоимости измельчения от установленной мощности приводного двигателя измельчителя [c.49]
Зависимость стоимости измельчения от установленной мощности приводного двигателя и веса измельчителя может быть представлена выражением [c.49]
В ряде случаев зарубежные фирмы выпускают дуговые сталеплавильные печи малой и средней емкости с механизмами перемещения электродов без противовесов. Такая система требует увеличения мощности приводных двигателей и соответствующей схемы автоматического регулирования режима работы печи. [c.407]
Номинальный сварочный ток, А Пределы регулирования сварочного тока, А Мощность приводного двигателя, кВт К. п. д. Масса, кг [c.95]
Работа подводимая на ал машины для приведения ее в действие, отнесенная к 1 кг массы подаваемой среды, называется удельной работой машины она в основном определяет необходимую мощность приводного двигателя машины. Из-за потерь энергии в машине удельная полезная, работа машины меньше ее удельной работы. [c.25]
Мощность приводного двигателя принимается с запасом, учитывающим возможное отклонение режима от расчетного уменьшения КПД и ухудшение изоляции двигателя в процессе наработки [c.212]
Многоступенчатое сжатие с промежуточным охлаждением приближает рабочий процесс компрессора к изотермическому. Поэтому при заданной степени повышения давления компрессора применение ступенчатого сжатия обусловливает существенную экономию мощности приводного двигателя (см. 10.4). [c.354]
Мощность, затрачиваемая насосом, необходима для создания нужного напора и преодоления всех видов потерь, неизбежных при преобразовании подводимой к насосу механической энергии в энергию движения жидкости по всасывающему и напорному трубопроводам. Измеряемая в кВт мощность насоса определяет мощность приводного двигателя и суммарную (установленную) мощность насосной станции. [c.5]
ОПРЕДЕЛЕНИЕ МОЩНОСТИ ПРИВОДНОГО ДВИГАТЕЛЯ [c.163]
Однако не всегда расчетные параметры подачи и напора совпадают с параметрами характеристики Q—Я. В этих случаях возникает необходимость в определении мощности на валу насоса и требуемой мощности приводного двигателя. [c.163]
Подготовка к проведению экспериментальных исследований. Перед началом экспериментов необходимо определить начальное давление рабочего вещества в контуре, поскольку мощность приводного двигателя стенда ограничена. Зная предельные значения Мц, при которых будут проводиться исследования, и оценив предельные значения условного числа Маха по входной скорости Л у Со/а , иужно определить наибольшую допустимую плотность ( 11, а по ней и давление рн при входе в модель. [c.132]
Если при исследованиях используют реальные газы с высокой плотностью, например фреоны, то при ограниченной мощности приводного двигателя приходится создавать давление на всасывании ниже атмосферного. В этом случае все режимы надо пройти за одно испытание. Предварительную обработку результатоп необходимо при этом вести в темпе проведения опытов, т. е. определять значения АТ, т] и я сразу же для каждой экспериментальной точки. Сопоставляя результаты расчетов, всегда можно определить момент, когда подсасывание атмосферного воздуха начинает влиять на результаты исследований. То]-д ) испытания прерывают, контур вакуумируют и заправл5пот заново. После остановки, даже не очень длительной (16—20 ч), контур также следует снова заправлять чистым газом, так 1(лк в него почти всегда проникает воздух. С учетом этой специфики надо стремиться к тому, чтобы объем контура был по возможности наименьшим. Если ограничений по мощности нет, то начальное давление в контуре выбирают таким, чтобы при самой низкой температуре охлаждающей воды не происходило конденсации газа в газовом теплообменнике. Это требование важно при определении мощности ступени по измерениям температур, когда наличие жидкой фазы в потоке на входе в ступень приводит к резкому увеличению погрешности в измерении температуры. [c.133]
Мощность приводного двигателя вентилятора нрини-v1, pт я с запасом, учитывающим возможное отклонение [c.189]
Для насосов с вращательным движением рабочих органов мощность насоса за вычетом механических потерь для поршневых насосов1 мощность, определяемая по индикаторной диаграмме Мощность, потребляемая насосом от привода Величина мощности "При номинальных значениях подачи, напора, частоты вращенил и вязкости Величина мощности при номинальной частоте вращения и 7 = О Номинальная мощность приводного двигателя при номинальной частоте вращения [c.29]
Пластмассы могут быть эффективно использованы для изготовления крупногабаритных зубчатых колес. Колесо диаметром 4,27 м и шириной около 100 мм из полиамида, получаемого анионной полимеризацией, применено на гидроэлектростанции для вращения фильтрующего диска массой 1,5 т. Оно собирается из 28 сегментов, соединяемых болтами. Использование такого колеса позволило снизить массу привода на 499 кг, уменьшить мощность приводного двигателя, упростить монтаж [13] . В приводе углеразмольной машины мощностью 37 кВт зубчатое колесо из полиамида Ыу1а1гоп ((1=230 мм Ьу,=355. мм) проработало 2 года без повреждений (металлические зубчатые колеса выходили из строя через несколько недель из-за- абразивного износа). Известны также примеры длительной эксплуатации зубчатых колес из полиамидов в приводах поперечного хода двухтонного мостового крана, линотипов (3 года), машин для-производства канатов (13 лет), сушильных барабанов бумагоделательных машин (3 года), намоточного барабана проволочно-волочильного станка и др. [13]. [c.270]
Пример, Требуется определить мощность приводного двигателя насоса ККН-10б по следующим данным число оборотов п = И4 об1мин напор Я = 120 м вод. ст. вязкость перекачиваемой жидкости 1000° ВУ. [c.173]
Для вязкости жидкости 1000° ВУ коэффициент /д, = 1 (рис. 98). Мощность приводного двигателя Мве = М + Меязк + 15,92 + 1,33 + 4,31 = 21,56 Л. с. [c.173]
Существенный недостаток подобного регулирования — значительные потери мощности на холостой ход насоса. Например, исследования, проведенные в ЦНИИТМАШе, показали, что при мощности приводного двигателя до 500 кет для привода разгруженных насосов тратятся 10—25% номинальной мощности. При этом с полной (номинальной) нагрузкой насос работает в среднем 50—60% времени. [c.207]
Учитывая, что энергонапряженность Э представляет собой отношение установленной мощности приводного двигателя измельчителя к его весу Сг необходимо отметить, что при оптимизации Рц и Сх происходит также оптимизация Э и Я ,. Это показано па рис. 10 и 11, на которых минимальной стоимости измельчения соответствуют оптимальные и Яу, характеризующие измельчитель данной конструкции при измельчении определенного материала в заданной области дисперсности. Зависимость стоимости измельчения от удельных энергонапряженности и производительности получит вид [c.51]
Зависимость стоимости измельчения от мощности приводного двигателя веса измельчителя Оа, его энергонапряженности Э и удельной производительности П , (рис. 18) отличается при грубом дроблении (кривая /) более крутой характеристикой, чем при дроблении 2, измельчении 3 и тонком измельчении 4. [c.58]
Насыщенность энергетических блоков АЭС насосным оборудованием очень велика. Так, блок с реактором ВВЭР-440 имеет 210, а блок с реактором РБМК-1000 —481 единицу насосного оборудования. Мощность привода насосного оборудования энергоблоков АЭС составляет до 90 % мощности собственных нужд. Установленная мощность приводных двигателей насосов АЭС равна примерно 10 % номинальной мощности блока, а расход электроэнергии на привод основного насосного оборудова- [c.183]
9 типичных неисправностей электродвигателя и способы их устранения
В этом обзоре мы рассмотрим типичные неисправности трехфазных асинхронных электродвигателей и способы их предупреждения и устранения.
Электрические неисправности электродвигателя
Электрические неисправности двигателя всегда связаны с обмоткой.
- Межвитковое замыкание может возникнуть при ухудшении изоляции в пределах одной обмотки. Возможные причины: перегрев обмотки, некачественная изоляция, износ изоляции вследствие вибрации. Определить межвитковое замыкание бывает сложно. Основной метод диагностики – сравнение сопротивления и рабочего тока всех трех обмоток. Первые симптомы межвиткового замыкания – повышенный нагрев двигателя и падение момента на валу. При этом по одной из фаз ток больше, чем по двум другим.
- Замыкание между обмотками происходит из-за смещения обмоток, механической вибрации и ударов. При отсутствии должной электрической защиты может возникнуть короткое замыкание и пожар.
- Замыкание обмотки на корпус. При данной неисправности электродвигатель может продолжать работать, если неправильно выполнены заземление и защита от короткого замыкания. Однако в работе он будет смертельно опасен, так как его потенциал будет находиться под фазным напряжением.
- Обрыв обмотки. Эта неисправность равносильна пропаданию фазы. Если обрыв происходит в работе, то двигатель резко теряет мощность и начинает перегреваться. При правильно выполненной защите двигатель отключится, поскольку ток по другим фазам будет повышен.
Для устранения большинства из этих поломок требуется перемотка двигателя.
Механические неисправности электродвигателя
Механические неисправности электродвигателя связаны с его конструкцией.
- Износ и трение в подшипниках. Проявляется в повышении механической вибрации и шума при работе. В этом случае требуется замена подшипников, иначе неисправность приведет к перегреву и падению производительности двигателя.
- Проворачивание ротора на валу. Ротор может вращаться в магнитном поле статора, а вал будет неподвижен. Требуется механическая фиксация ротора на валу.
- Зацепление ротора за статор. Эта проблема связана с механической поломкой подшипников, их посадочных мест или корпуса двигателя. Кроме того, подобная неисправность приводит к повреждению обмотки статора. Практически не подлежит ремонту.
- Повреждение корпуса двигателя. Может происходить из-за ударов, повышенных нагрузок, неправильного крепления или низкого качества двигателя. Ремонт является трудоемким из-за трудностей соосной установки переднего и заднего подшипников.
- Проворачивание или повреждение крыльчатки обдува. Несмотря на то, что двигатель продолжит работать, он будет перегреваться, что существенно сократит срок его службы. Крыльчатку необходимо закрепить (для этого используется шпонка или стопорное кольцо) или заменить.
Аварийные ситуации при работе электродвигателя
Существуют неисправности, не связанные непосредственно с двигателем, но влияющие на его работу, характеристики и срок службы. Большинство этих неисправностей вызваны механической перегрузкой, увеличением тока, и, как следствие, перегревом обмоток и корпуса.
- Увеличение нагрузки на валу вследствие заклинивания привода либо приводимых механизмов.
- Перекос напряжения питания, который может быть вызван проблемами питающей сети либо внутренними проблемами привода.
- Пропадание фазы, которое может произойти на любом участке питания двигателя – от питающей трансформаторной подстанции до обмотки двигателя.
- Проблема с обдувом (охлаждением). Может возникнуть из-за повреждения крыльчатки двигателя при собственном охлаждении, из-за останова вентилятора внешнего принудительного охлаждения или вследствие значительного повышения температуры окружающей среды.
Способы защиты электродвигателя
Для защиты электродвигателя от внутренних и внешних неисправностей, а также для минимизации дальнейших трудозатрат по его ремонту применяют различные устройства.
1. Мотор-автоматы и тепловые реле
Мотор-автоматы (автоматы защиты двигателя) и тепловые реле используют для обнаружения превышения тока по одной или всем фазам двигателя. В случае превышения через некоторое время происходит отключение привода.
В отличие от мотор-автомата, у теплового реле нет силовой коммутации. Оно имеет только управляющий контакт, который размыкает питание силовой цепи. Мотор-автомат является самостоятельным коммутационным устройством, способным выключать двигатель.
Минус теплового реле заключается в отсутствии защиты от короткого замыкания. Мотор-автомат имеет защиту от перегрузки и электромагнитную защиту от короткого замыкания, которая мгновенно срабатывает и выключает двигатель при превышении тока уставки в 10-20 раз.
Данные устройства используются наиболее широко и при правильной установке и настройке способны с большой долей вероятности защитить электродвигатель и оборудование от поломки и других негативных последствий.
2. Электронные реле защиты двигателей
Данный вид защиты обеспечивает большой выбор различных защит. Основным элементом таких реле является микропроцессор, который анализирует мгновенные значения напряжения и тока и принимает решения на основе заданных настроек. Это может быть выдача сигнала на индикацию либо на отключение двигателя.
3. Термисторы и термореле
Когда по какой-то причине не сработала тепловая защита по перегрузке, последний рубеж обороны — термозащита. Внутрь обмотки устанавливается термочувствительный элемент (как правило, термистор или позистор), который меняет свое сопротивление в зависимости от температуры. При пересечении порога срабатывает соответствующая защита, и двигатель отключается.
Возможно применение более простых дискретных термореле (термоконтактов), которые размыкают контрольную или тепловую цепь, что приводит к аварийной остановке электродвигателя.
4. Преобразователи частоты
Обычно преобразователи частоты располагают несколькими видами защиты – по превышению момента и тока, по превышению напряжения, обрыву фазы и проч. Кроме того, возможно ограничение момента и тока. В этом случае на двигатель будет подаваться напряжение с меньшим уровнем и частотой, если будет обнаружена перегрузка. При этом будет выдано соответствующее сообщение оператору, а двигатель может продолжать работать.
Также производители частотных преобразователей рекомендуют устанавливать защитный автомат на входе ПЧ, тепловое реле на выходе и термисторную защиту.
Другие полезные материалы:
Выбор электродвигателя для компрессора
Как определить параметры двигателя без шильдика?
Выбор мотор-редуктора для буровой установки
Н-мостовой приводной двигатель, анализ неправильного использования дополнительной выходной функции STM32 PWM
Если идеи по устранению неполадок были вам полезны, не забудьте в спешке устранить дождь или просто потусоваться. Кодовые слова и устранение неполадок очень утомительны, не более того
Аппаратное обеспечение - это не копирование схем, использование паяльника, знание некоторого программного обеспечения, тщательный анализ, поиск проблем и сбор ключей - это одно и то же. Чтобы
В проекте разработки навигационного аппарата новичок разработал следующую схему привода, которая должна приводить в действие двигатель постоянного тока для удлинения и укорачивания рычага, использовать двигатель управления для вращения вперед и использовать трубку NMOS для создания приводного двигателя. Микросхема драйвера MOS лампы используется для привода двигателя.
P2 подсоединен к двигателю. Анализ схемы показывает, что его можно использовать.
Логический анализ, новичок строит программу так:
1. TIM1_Ch2 и TIM1_Ch2N используют дополнительные ресурсы ШИМ STM32 для управления двигателем, реализация кода относительно проста (здесь я не буду вдаваться в подробности, STM32 может разрабатывать дополнительный выход ШИМ), форма дополнительного выходного сигнала аналогична следующей
Частота - 10 К. Этот новичок проектировал импульсный источник питания раньше, поэтому, когда он увидел мост, он сказал, что он приводится в действие дополнительной схемой.
2. Во время фактической отладки двигатель дрожал в случае низкочастотного выхода, а затем увеличивал частоту на 10K, чтобы решить эту проблему.
На самом деле есть большие проблемы! ! !
Давайте проанализируем эту простую схему. U4 и U5 используются в качестве драйверов МОП. Они не что иное, как усиление сигнала, вводимого выводом IN. Это легко понять, потому что на входе IN высокий уровень, верхняя лампа включена, а на входе низкий, что соответствует управляющей лампе MOS. Нижняя трубка открыта, поэтому выходной двигатель можно понимать как усиление сигнала на входе IN. Новичок допустил ошибку в процессе проектирования.Мост Н дополняет? ? ? ? Это означает, что важный ток, которым я управляю двигателем, течет от двигателя в каждый момент, и рабочий цикл установлен на 50%, частота установлена на 10K, как состояние стационарного двигателя, меньше чем 50% обратного вращения, больше чем 50% прямого вращения. . . . .
С «микроскопической» точки зрения на первый взгляд кажется, что двигатель останавливается, потому что ваш 50% высокий уровень вращается вперед в очень маленьком сегменте, а 50% низкий уровень инвертируется очень маленьким сегментом. Например, улитка взбирается на стенку колодца, поднимается на одну ступеньку, скользит на одну ступеньку и, наконец, сохраняет исходное положение, просто потому, что частота увеличена до 10K, время высокого и низкого уровня очень мало, но с эквивалентного времени это в основном Двигатель потреблял энергию батареи при прямом и обратном вращении.
Как использовать драйвер H-моста:
Для прямого вращения я включаю Q5, а затем контролирую рабочий цикл входа ШИМ U4 (то есть управление Q2, Q3) для управления скоростью прямого вращения. Аналогично, для обратного вращения я включаю Q5, а затем управляю ШИМ U5. Введите (то есть, управляйте Q4, Q5) размер рабочего цикла и управляйте скоростью инверсии. Это правильный способ управления H-образным мостом.
Тогда я еще раз спрошу, где STM32PWM дополняет?
Это очень полезно для одиночного плеча моста, и контроль мертвой зоны не включает сгоревший диод одновременно.
Если они дополняют друг друга, то одновременно подключаются только верхняя и нижняя трубки, что очень безопасно.
Это вопрос кого-то на форуме. Если вы поняли дополнительный вывод, H-мост, вы, естественно, ответите:
http://bbs.21ic.com/icview-624460-1-1.html
Следующая схема, использующая дополнительную функцию вывода ШИМ STM32, является проблематичной.
Это следует понимать ~
Электродвигатель под увеличительным стеклом - что можно прочитать на паспортной табличке электродвигателя
При выборе преобразователя частоты мы в первую очередь учитываем двигатель - его мощность, подачу или ток. В этой статье вы найдете наиболее важную информацию о двигателе, а также их значение, что также может быть полезно при выборе двигателя для приложения, а затем при выборе соответствующего инвертора.
Вернуться к Unitronics Inverter Academy
Что такое электродвигатель?
Электродвигатель - это машина, преобразующая электрическую энергию электричества в механическую.Проще говоря, подключение к двигателю электрического тока приведет его в движение.
Основное подразделение электродвигателей
Мы поставляем электродвигатели с двумя разными типами напряжения - переменного и постоянного тока. Это свойство создало 2 основные группы, на которые мы делим двигатели. Ниже представлена разбивка электродвигателей. В автоматизации асинхронные электродвигатели с короткозамкнутым ротором используются в большинстве приложений, и именно на этом типе двигателей мы сосредоточимся в дальнейшем.
Устройство и работа асинхронного двигателя с короткозамкнутым ротором
Наиболее важными элементами конструкции асинхронного двигателя с короткозамкнутым ротором являются неподвижный статор и вращающийся / вращающийся ротор.
Источник
В конструкции сердечника статора (внутри) и ротора (снаружи) выполнены пазы, в которые затем вставляются обмотки. Форма канавок и их количество зависят от производителя и двигателя.Между ротором и статором должен быть минимально возможный воздушный зазор.
Обмотка статора изготовлена из изолированного провода, специально пропитанного и усиленного для уменьшения воздействия механических колебаний во время работы устройства.
Источник
Принцип работы двигателя асинхронный отсек
Обмотки статора создают вращающееся электромагнитное поле, которое вращается вокруг неподвижного ротора.Создаваемое поле пересекает обойма ротора. Он начинает индуцировать там напряжение, а затем начинает течь электрический ток.
Возникновение тока в магнитном поле создает электродинамическую силу, которая действует по касательной к окружности ротора. Следовательно, существует также электромагнитный момент, который приводит ротор в движение, что увеличивает его скорость вращения.
Если мы увеличим скорость ротора, его клетка будет прорезать магнитное поле все медленнее и медленнее.Это приведет к уменьшению наведенной электродвижущей силы и уменьшению тока, протекающего в стержнях клетки, а, следовательно, и к уменьшению электромагнитного момента. Ротор перестанет ускоряться и будет двигаться с постоянной скоростью, когда значение электромагнитного момента будет равно моменту нагрузки. Если бы не было резистивного момента, ротор достиг бы скорости вращения магнитного поля (то есть достиг бы синхронной скорости). Такой ситуации практически не будет, потому что всегда есть момент нагрузки (например,исходящие от подшипников или сопротивления воздуха). В этом случае частота вращения ротора будет ниже синхронной. Это произойдет, когда электромагнитный момент и нагрузки будут иметь одинаковую величину. Это так называемая асинхронная скорость, по которой двигатель получил свое название.
Заводская табличка двигателя
Неотъемлемым элементом каждого электродвигателя является заводская табличка. Благодаря ему мы узнаем технические данные двигателя, которые затем вводим в преобразователь частоты.Важно хорошо понимать их при эксплуатации и контроле.
1 - Тип двигателя
Тип двигателя отображается как первый параметр. Здесь мы имеем дело с трехфазным двигателем, об этом нам говорит знак 3 ~.
2 - Тип двигателя
При обозначении типа двигателя мы рекомендуем вам обращаться к техническому описанию двигателя, поскольку производители могут использовать свои собственные обозначения. Отличный пример представлен на паспортной табличке, показанной ранее.Посмотрев на карту двигателя, мы можем узнать, что именно так маркируются серии двигателей мощностью менее 0,75 кВт.
Источник
С этим типом маркировки мы можем встретить ряд букв и цифр. Ниже приведены некоторые примеры тегов с их пояснениями:
- Ex - Если двигатель предназначен для использования во взрывоопасных зонах, знак «Ex» будет помещен в самом начале. Это означает, что двигатель имеет взрывозащищенный корпус;
- S - асинхронный двигатель.Если за буквой «F» следует буква «S», это означает, что двигатель не оборудован собственной вентиляцией.
- К - электродвигатель фланцевый;
- L - электродвигатель с фланцем на лапке;
- г или ч (строчные, разные в зависимости от производителя) - производственная серия двигателя.
- 80 - После буквы, описывающей серию двигателей, будет число, обозначающее подъем вала, то есть высоту от земли до центра вала в мм.
- S, M или L - размер корпуса с последующим повышением.
- - 4 - информация о количестве полюсов обмотки (2, 4, 6, 8). Он может стоять после дефиса или без него. КОЛИЧЕСТВО ПОЛЮСОВ ≠ КОЛИЧЕСТВО ПОЛЮСНЫХ ПАР. Если у нас 4 полюса, количество пар полюсов будет 2p.
- A - Заглавная буква для обозначения длины статора - A, B, C, D, где A - самая короткая, а D - самая длинная.
- 1 - Размер фланца (только для фланцевых двигателей - K, L) - чем выше цифра, тем меньше фланец, отсутствие цифры для фланцевых двигателей означает большой фланец.
Можно встретить дополнительную маркировку, например, о торможении двигателя. Такая информация содержится в паспорте двигателя или руководстве пользователя.
3 - Способ крепления статора и двигателя
Обозначение Bx, где x - определенное число, означает способ крепления двигателя и статора. Если у двигателя нет такой информации, по умолчанию предполагается, что это B3. В основном мы находим здесь обозначение:
- B3 - крепление статора: на лапах; подвеска двигателя: к кузову;
- B3 / B5 - крепление статора: на лапах; крепление мотора: к корпусу на дополнительных ручках;
- B3 / B14 - крепление статора: на лапах; крепление мотора: к корпусу на дополнительных ручках;
- В5 - крепление статора: фланцевое; Крепление двигателя: на скамейке, свободно и к крышке;
- В6 - крепление статора: на лапах; Крепление мотора: к стене (можно закрепить мотор вертикально).
4 - Рабочая температура
Этот параметр определяет максимальную рабочую температуру окружающей среды для двигателя. Если он не указан, предполагается, что оно составляет 40 ° C.
5 - Серийный номер
Серийный номер производителя, который важен, например, во время гарантийного процесса.
6 - Класс изоляции
Сообщает нам о типе используемых изоляционных материалов. Если оно будет превышено при непрерывной работе, сокращается срок службы и безотказная работа двигателя.Класс изоляции обозначается буквами, а в основном мы встретим символы:
- А - рабочая температура до 105 ° С.
- E - рабочая температура до 120 ° C.
- Б - рабочая температура до 130 ° С.
- F - рабочая температура до 155 ° C.
- H - рабочая температура до 180 ° C.
7 - Класс защиты
Степень защиты, обеспечиваемая корпусом электрического устройства от: доступа к опасным частям внутри корпуса, попадания посторонних твердых частиц, вредного воздействия попадания воды.Степень защиты назначается в соответствии со стандартом PN-EN 60529: 2003. Маркировка состоит из букв IP, за которыми следуют 2 цифры. Кроме того, они могут появляться в конце двух букв.
Источник
8- Вид работ
Тип работы очень важен при выборе двигателя для приложения. Он сообщает нам, может ли двигатель работать 24 часа в сутки, 7 дней в неделю или ему нужен перерыв.
- S1 - Непрерывная работа.
- S2 - Временная работа.
- S3 - Прерывистая работа.
- S4 - Прерывистая работа с запуском.
- S5 - Прерывистая работа с электрическим торможением.
- S6 - Длительная периодическая работа с перерывами в работе.
- S7 - Длительная работа с электрическим торможением.
- S8 - Периодическая длительная работа с изменением частоты вращения.
9 - Стандарты и директивы
Информация о стандартах и директивах, которым соответствует двигатель.
10 - Частота номинальная
Номинальная частота напряжения, к которому может быть подключен двигатель. На заводской табличке нашего примера видно, что двигатель можно подключать к сети с частотой 50 Гц, а также 60 Гц. Следует помнить, что для разных частот меняются последующие параметры, то есть мощность, ток или номинальная скорость.
11 - Мощность двигателя
Номинальная активная мощность двигателя, выраженная в кВт. Это полезная сила, которая передается на вал двигателя.Это очень важно при выборе преобразователя частоты для применения.
12 - Номинальное напряжение
Это напряжение, которое мы можем подать на двигатель. В этом случае на двигатель может подаваться напряжение в диапазоне 220–230 В и 380–420 В для частоты 50 Гц или 255–275 В и 440–480 В для частоты 60 Гц.
В каждом диапазоне напряжений есть указание, как подключать обмотки двигателя - будь то звезда (Y) или треугольник (Δ). Схема подключения звезда-треугольник и практическая реализация представлены ниже.
Источник
13 - Номинальный ток
Ток двигателя - это величина тока, потребляемого из сети и протекающего в проводниках, соединяющих сеть с клеммами двигателя.
Значение тока меняется в зависимости от того, как намотан двигатель. В нашем примере для частоты напряжения 50 Гц и значения напряжения в диапазоне 220-240 В (соединение треугольником) оно будет 2,56 А, а для напряжения в диапазоне 380-420 В (соединение звездой) ток будет 1.47A.
14 - Частота вращения номинальная
Группа важнейших параметров двигателя - частота вращения. Это количество полных оборотов за 1 минуту. Скорость вращения зависит от нескольких параметров: количества полюсов, частоты напряжения питания и КПД.
После считывания скорости вращения для заданной частоты мы можем узнать, сколько пар полюсов имеет двигатель. Чем ниже частота вращения, тем больше пар полюсов.
В таблице ниже показаны скорости вращения магнитного поля, которые зависят от количества пар полюсов для частоты напряжения 50 Гц. Номинальная частота вращения отличается от указанной в таблице на величину скольжения. Определение скольжения будет объяснено позже.
15 - Коэффициент мощности
Коэффициент мощности, обозначаемый как cosφ, выражает отношение активной мощности, то есть мощности, которая фактически выполняет работу, к полной мощности (геометрическая сумма активной и реактивной мощности).Реактивная мощность - это мощность, необходимая для создания возбуждающего или намагничивающего тока. Все эти факторы рассчитываются с использованием треугольника мощности в цепях постоянного тока.
16 - КПД
Отображается не на каждом двигателе, так как его очень легко вычислить по формуле. Этот коэффициент показывает степень преобразования потребляемой электроэнергии в механическую.
КПД можно рассчитать по формуле:
Где:
- П - мощность на валу;
- U - напряжение питания
- I - потребление тока
- Cosφ - коэффициент мощности
Прочие параметры двигателя
Полозья
Когда двигатель работает, скорость вращения ротора ниже, чем скорость вращающегося магнитного поля.Проскальзывание имеет значение. Скорость вращающегося магнитного поля можно рассчитать по формуле:
Где:
- f - частота номинального напряжения двигателя
- p - количество пар полюсов
Считывая значение номинальной скорости двигателя с таблички, мы можем рассчитать значение скольжения. Например, возьмем значение n = 1380 об / мин.
Для того же двигателя n0 = 1500 об / мин. Рассчитываем скольжение по формуле:
После подстановки данных значение номинального скольжения равно s = 0.08. Скольжение также может быть выражено в оборотах / мин.
Проскальзывание зависит от нагрузки на вал двигателя. Чем он больше, тем больше будет величина скольжения. Скольжение будет достигнуто, когда на вал приложена максимальная номинальная нагрузка. Тогда значение потребляемого тока и частота вращения также достигнут своего номинального значения.
Номинальный крутящий момент
Также на основе данных паспортной таблички мы можем определить номинальный крутящий момент двигателя, то есть мы можем узнать номинальное значение КПД вала.
Момент рассчитывается по формуле:
Совет!
Нам не нужно перечислять некоторые переменные. Все необходимые переменные приведены в руководстве пользователя. Из этой таблицы мы можем прочитать такие параметры как:
- Номинальный ток IN
- Номинальный крутящий момент, МН
- Значение отношения номинального тока IN к пусковому току IA
- Значение отношения номинального момента MN к пусковому моменту MA
- Значение пускового крутящего момента M до максимального значения крутящего момента MNK
Сводка
Прочитав и поняв параметры вашего электродвигателя, вы можете многое о нем рассказать.Такие знания чрезвычайно полезны при управлении таким двигателем с помощью преобразователя частоты. Мы снизим риск повреждения машины, но также при соответствующих настройках сделаем ее очень эффективной.
Есть вопросы? Может быть, вам нужна помощь в выборе преобразователя частоты для вашего двигателя? Используйте наши предыдущие статьи:
- Как выбрать преобразователь частоты для вашей области применения?
- Способы пуска двигателей и преимущества использования преобразователей частоты
или обратитесь к консультантам Unitronics: drivers @ elmark.com.pl.
Вернуться к Unitronics Inverter Academy
.Электродвигатели - оптовый продавец электротехники
Везде, где устройства работают под высокой постоянной или мгновенной нагрузкой и потребность в их мощности очень высока, трехфазный двигатель необходим. Это устройства, принцип действия которых основан на магнитном поле, которое циркулирует в воздушном зазоре между статором и ротором. Проще говоря, трехфазный электродвигатель - это преобразователь электромагнитной энергии, который преобразует электрическую энергию в механическую и наоборот в соответствии с законами электромагнитной индукции.
Мы предлагаем двух-, четырех-, шести- и восьмиполюсные трехфазные электродвигатели, а также многоскоростные трехфазные устройства простой, но прочной конструкции по очень привлекательной цене. Трехфазный двигатель - это универсальное устройство, используемое для привода многих машин в промышленном и сельскохозяйственном секторе, а также в домашнем хозяйстве. Наши двигатели отличаются высокой эксплуатационной безопасностью, низкими эксплуатационными расходами и отсутствием необходимости в специализированном обслуживании.
Как подключить трехфазный двигатель?
Каждый трехфазный электродвигатель имеет определенное количество обмоток и полюсов, а также имеет разные уровни напряжения, поэтому перед его подключением обязательно ознакомьтесь с рекомендациями DTR для конкретного устройства. Запитать трехфазный двигатель намного сложнее, чем с однофазным устройством, и все происходит внутри распределительной коробки, расположенной на самом двигателе.
Предлагаемые трехфазные электродвигатели отлично зарекомендуют себя в различных условиях, на различных машинах и в самых разнообразных рабочих условиях. Помимо проверенных трехфазных двигателей, мы также предлагаем широкий ассортимент запчастей для этого типа устройств от известных и заслуживающих доверия производителей.
.Электродвигатель для лодки, автомобиля
Я испытал много литий-ионных аккумуляторов 18650 разных фирм и разных типов. Аккумуляторные батареи SAMSUNG INR18650-35E
достигли лучших показателей;
максимальная емкость - 3500мАч,
максимальный непрерывный ток разряда - 10А,
максимальный мгновенный ток разряда - 35А,
Описание тестов батареи SAMSUNG INR18650-35E
1. Измерьте максимальную емкость.
Аккумулятор был загружен резистором, который потреблял в среднем ток 0,2А.После 17,5 часов разряда напряжение упало до 2,5В.
Нельзя разрядить аккумулятор до напряжения ниже 2,5 В. Аккумулятор имеет емкость 3.5Ah = 3500mAh. Батарея во время теста не прогревалась.
2. Измерение максимального продолжительного тока.
Аккумулятор был загружен резистором, который потреблял в среднем ток 10А. Измерение длилось 19 минут 15 секунд (0,32 часа). Напряжение аккумулятора упало до 2,5 В.
Аккумулятор может непрерывно и непрерывно разряжаться до 10А.Аккумулятор имеет емкость 3,2 Ач = 3200 мАч. Во время теста аккумулятор прогрелся до 46 градусов С.
3. Измерение максимального мгновенного тока.
Батарея была загружена резистором, потребляющим ток 35А. Измерение длилось 20 секунд. Напряжение аккумулятора упало до 3,0 В.
Аккумулятор можно разряжать током максимум 35А, но не дольше 20 секунд. Во время теста аккумулятор прогрелся до 36 градусов С.
Во время всех тестов батарея охлаждалась небольшим вентилятором диаметром 5 см.Температура в тестовой комнате составляла 25 градусов по Цельсию.
Аккумулятор достиг максимальной емкости 3500 мАч, когда он был разряжен током 0,2 А.
Аккумулятор может непрерывно потреблять ток до 10А без перебоев, ёмкость не сильно уменьшится до 3200 мАч.
Когда от аккумулятора тянется такой большой ток, его нужно охладить, проще всего с помощью вентилятора.
Перезаряжаемые батареи можно собирать вместе. В комплекте они больше нагреваются.
Температура аккумуляторов не должна превышать 50 градусов.C
При малом энергопотреблении температура аккумуляторов не превышает 50 градусов С.
Очиститель двигателя STP для дизельного топлива, 200 мл
Очиститель двигателя STP для дизельного топлива, 200 мл - Inter Cars StoreК сожалению, для правильной работы веб-сайта необходимо включить JavaScript в настройках вашего браузера.
Увеличение
Фотографии защищены авторским правом.Копирование их без согласия сайта запрещено.
Посмотреть все фотографии
Характеристики продукта| Производитель | STP |
| Индекс | STP 30-037 |
| Объем [л] | 0,2 |
Нет отзывов о товаре
19,86 PLN Цена за 1 штуку
Курьерская доставка DHL 12,30 злотых 1-2 рабочих дня
Доставка курьером DPD 11,30 злотых 1-3 рабочих дня
Самовывоз в пункте самовывоза 0,00 злотых 2 часа-2 рабочих дня
Доставка в посылочный автомат 12,00 злотых 1-2 рабочих дня
Характеристики продукта
| Производитель | STP |
| Индекс | STP 30-037 |
| Объем [л] | 0,2 |
Мы хотим, чтобы вам было комфортно пользоваться нашим сайтом.Для этого мы стараемся адаптировать контент, доступный на нашем веб-сайте, в соответствии с вашими предпочтениями. Это возможно благодаря хранению файлов cookie в вашем браузере и обработке компанией Inter Cars S.A., расположенной в Варшаве, ул. Powsińska 64, 02-903 Warszawa и ее доверенных партнеров - персональные данные для аналитических, статистических и маркетинговых целей. Продолжая использовать наш веб-сайт без изменения настроек конфиденциальности, вы даете согласие на хранение файлов cookie в вашем браузере.Помните, что вы всегда можете изменить настройки файлов cookie, получить дополнительную информацию о правилах обработки ваших личных данных и ваших правах в нашей Политике конфиденциальности.
× .|
Один из первых вращающихся электродвигателей был изобретен в 1821 году. создал Майкл Фарадей . Эта электрическая машина только много лет спустя произвела небольшую революцию в жизни людей. Сейчас мы живем в 21 веке, и мир согласованно изменился, но на протяжении многих лет лидером в технических приложениях был асинхронный двигатель, который является одним из последних поколений электродвигателей.Он имеет самое широкое применение среди всех типов электродвигателей, особенно используемых в промышленности, а также в бытовой технике. Он отличается от всех двигателей тем, что имеет простую конструкцию, удобен в эксплуатации, имеет низкие производственные и эксплуатационные расходы и, кроме того, их приводные свойства хороши. Асинхронный электродвигатель - одна из асинхронных электрических машин, которые также являются машинами переменного тока. Они преобразуют электрическую энергию в механическую (работа двигателя машины) или механическую энергию в электричество (работа генератора машины). Их классификация такова:
Асинхронный двигатель состоит из двух основных частей:
На внутренней стороне сердечника статора и снаружи сердечника ротора сделаны специальные канавки, называемые пазами, в которые помещаются обмотки. Часть сердечника между соседними бороздками называется зубом. Прорези и зубья могут иметь разную форму, обычно их количество в статоре и роторе разное. Между статором и ротором существует как можно меньший воздушный зазор. Обмотка статора изготовлена из изолированного провода, пропитанного и усиленного для снижения вероятности повреждения из-за механических колебаний.
Вращающееся магнитное поле, создаваемое обмотками статора, вращается вокруг неподвижного ротора. В результате этого прорезания поля стержней обоймы ротора в них индуцируется напряжение (отсюда и название «асинхронный двигатель»), и в них начинает течь ток (см. Явление электромагнитной индукции). Поток тока в магнитном поле создает электродинамическую силу (см. Явление электродинамической силы), действующую по касательной к окружности ротора, и, таким образом, также электромагнитный момент.Если значение этого момента больше, чем значение момента нагрузки, ротор начинает двигаться и начинает увеличивать свою скорость вращения. Увеличение скорости вращения ротора приводит к тому, что стержни его обоймы рассекаются магнитным полем на все более низкой скорости, что приводит к уменьшению значения наведенной электродвижущей силы и уменьшению значения тока, протекающего в стержнях. клетки, и, таким образом, также уменьшается значение электромагнитного момента. Если этот крутящий момент упадет до значения, равного крутящему моменту нагрузки, ротор перестанет ускоряться и продолжит работать с постоянной скоростью.Если бы не было момента сопротивления, ротор достиг бы скорости, равной скорости вращения поля, и, следовательно, синхронной скорости. В таком случае поле ротора будет стационарным по отношению к полю статора, поэтому поле статора не будет разрезать стержни каркаса, и в них не будут протекать токи, не возникнет электромагнитный момент. Однако такая ситуация невозможна в реальном двигателе, потому что всегда существует момент нагрузки, например момент трения в подшипниках или сопротивление воздуха (если ротор не приводится в движение механически каким-либо другим двигателем).Таким образом, ротор достигнет скорости (обычно немного меньшей, чем синхронная скорость), при которой электромагнитные моменты двигателя и нагрузки будут одинаковыми. Поскольку это не синхронная скорость, это должна быть асинхронная скорость, благодаря которой асинхронный двигатель получил свое второе название - «асинхронный двигатель». См. Также: | |||||
Оптимизируйте доступность навалочных судов - используйте масляный фильтр CJC® на дизельном двигателе
На малых балкерах или во время операций SECA используется большое количество различных видов дизельного топлива. Для работы необходимо чистое дизельное топливо. Содержание дизельного топлива в чистоте и отсутствии воды в отстойниках и дневных баках имеет решающее значение для достижения хороших характеристик двигателя.
Задача
Микробное загрязнение может стать большой проблемой, если дизельное топливо не содержится в чистом и сухом виде.Если вы не держите дизельное топливо чистым и сухим, вы можете резко сократить срок службы топливных форсунок и топливных насосов и рискуете потерять энергию из-за заблокированных фильтров.
Преимущества установки масляных фильтров CJC®
- Сохранение эффективности навалочного судна и предотвращение обесточивания судна
- Оптимизация доступности навалочного судна
- Снижение риска микробного загрязнения дизельного топлива
- Продление срока службы топливные форсунки и насосы
Установив решения для масляных фильтров CJC® В системе вашего дизельного двигателя вы получите масляный фильтр с превосходными свойствами по удалению воды и твердых частиц и наивысшей грязеемкостью.Это приводит к снижению затрат, повышению надежности двигателя и производительности вашего судна.
С технической точки зрения, CJC® известен тем, что сохраняет масло чистым и сухим с минимальным обслуживанием, что документировано в течение многих лет и в нескольких установках дизельных двигателей балкеров. Решения CJC® Oil Filter устанавливаются многими судовладельцами по всему миру.
Выбирая масляные фильтры CJC®, вы обеспечиваете длительный срок службы двигателя, уменьшаете потребность в техническом обслуживании и избегаете обесточивания из-за засорения фильтров.
Ваши решения
Для дизельных двигателей на балкерах вам потребуются:
- Фильтр-сепаратор CJC®, PTU
Системные решения CJC® подходят для всех размеров цистерн и двигателей и поставляются по всему миру. Благодаря тесному сотрудничеству с техническими организациями мы поможем вам выбрать правильное решение в зависимости от типа системы и условий окружающей среды.
.Силовые установки - лодки RIB, электропривод, детали двигателя
Двигательные установки являются, после двигателя, самой важной частью лодки. Все достижения лодки, такие как скорость, ускорение, маневренность, эффективность и само предназначение лодки, зависят от силовой установки, выбранной пользователем. Наиболее распространенная система привода - это жесткая конструкция карданного вала. Приводной крутящий момент передается от двигателя через реверсивно-понижающий редуктор на вал, на котором установлен гребной винт.Сам вал засажен в так называемый ножны вала, которые в зависимости от конструкции и материала лодки интегрируются в корпус. В зависимости от мощности двигателя используются валы разного диаметра (все больше и больше с увеличением мощности двигателя), при этом труба вала может быть оснащена одним, двумя или даже тремя подшипниками с водяной смазкой. Система управления выполнена в виде пульта управления за гребным винтом. Иногда мы находим по бокам от пропеллера две рулевые пластины.Эта система рулевого управления неэффективна при низких оборотах двигателя.
Жесткое расположение вала встречается на водоизмещающих лодках, рыбацких лодках, спасательных шлюпках, больших парусных лодках со вспомогательным двигателем для маневрирования. Другая система привода - это тип «Z». Его часто можно встретить на скоростных прогулочных катерах, прогулочных катерах и торговых судах. Эта система используется многими компаниями, производящими бортовые двигатели Mercruiser, Volvo Penta, Yanmar, а также другими производителями бортовых двигателей.Номенклатура этой системы основана на расположении валов трансмиссии. Горизонтальный входной вал мощности к коробке передач / коробке передач, вертикальный вал передачи мощности и горизонтальный выходной вал, на котором был установлен гребной винт. Система привода Z-типа обеспечивает маневренность вперед-назад и рулевое управление вправо-влево. Благодаря такому решению не требуется дополнительной коробки редуктора маневрирования и использования руля направления за гребным винтом. Кроме того, это дает возможность снижать обороты двигателя в зависимости от необходимости.
Еще одна трансмиссия - система JET.Используется там, где главное - полное погружение лодки в воду. Основными пользователями таких силовых установок являются отраслевые службы, такие как военные, аварийные службы и полиция. В основном они приводятся в действие стационарными дизельными двигателями. Из-за метода передачи привода их КПД на 30% ниже, чем у систем типа Z и системы с жестким валом. Приводной крутящий момент передается посредством водяной струи, создаваемой высокоэффективным водяным насосом, приводимым в движение стационарным двигателем.Для них не требуется реверсивная коробка, но мы часто видим, что она используется для согласования частоты вращения двигателя с JET и так называемой ополаскивание / очистка корзины гребного винта. Эта система требует особой конструкции корпуса, которая обеспечит адекватный и непрерывный приток воды в корзину для всасывания воды. Перед выбором такой двигательной установки рекомендуется обратиться к производителю для выбора подходящей модели гребного винта. Неправильный выбор подруливающего устройства может привести к тому, что двигатель не достигнет номинальной скорости, а это может привести к перегрузке двигателя и невозможности достижения проектной скорости лодки.
Последняя приводная система, которую мы обсуждали, - это поверхностный привод, называемый SURFACE DRIVE. Эта система предназначена для высокоскоростных коммерческих и прогулочных судов. Эта система представляет собой вариант расположения гребного винта на валу, однако в случае наземного привода вал можно проворачивать и обрезать. Благодаря этому решению лодки, оснащенные такой системой, могут, как приводы JET, воздействовать на мелководье и, как и приводы "Z", поворачиваться без необходимости использования рулевого управления за гребным винтом.Использование такой системы увеличивает скорость лодки примерно на 15%, маневренность и снижает общую осадку. Кроме того, благодаря этому решению снижаются затраты, связанные с проведением периодических проверок, которые во много раз из-за высокой стоимости аренды крана достигают нескольких тысяч злотых. В настоящее время на рынке можно найти несколько решений для поверхностных приводов, двух и одного винта.
.