Контроллер двигателя
Устройства управления электродвигателями
Устройство (система) управления электродвигателем (контроллер двигателя) - устройство или группа устройств, которые предназначены для управления электродвигателем.
Устройство управления электродвигателем может включать ручные или автоматические средства для запуска и остановки двигателя, средства выбора прямого или обратного направления вращения, выбора и регулирования скорости вращения, регулирования или ограничения момента, защиту от перегрузки и от неисправности.
Каждый электродвигатель должен иметь своего рода систему управления (контроллер). Система управления электродвигателем в зависимости от задачи будет иметь различные характеристики и сложность.
Простейшим случаем управления электродвигателем является выключатель который соединяет электродвигатель с источником энергии, например как в небольших бытовых приборах или электроинструменте (дрели и др.). Переключение может осуществляться вручную, с помощью реле или контактора подсоединенного к датчику для автоматического запуска или остановки электродвигателя. Переключатель может иметь несколько положений для выбора различных способов подключения электродвигателя, что может позволить уменьшить пусковое напряжение, выбирать направление и скорость вращения.
Более сложные системы управления электродвигателями могут использоваться для точного управления скорости и момента электродвигателя, могут быть частью системы для точного управления угловым положением управляемого механизма.
Устройства управления электродвигателями могут управляться вручную, удаленно или автоматически. Они могут иметь, как только функции старта и остановки двигателя, так и многие другие функции.
Устройства управления двигателями можно классифицировать по типам управляемых электродвигателей (таких как СДПМ, КДПТ и др.) или по назначению.
Устройства для прямого подключения
Устройства с помощью которых электродвигатель напрямую подключается к источнику питания. Самый простой способ подключения. Небольшие электродвигатели некоторых типов могут быть включены: напрямую в розетку, с использованием выключателя, через автоматический выключатель. Такой способ подключения мгновенно соединяет электродвигатель с сетью питания.
Устройство плавного пуска
Используется для уменьшения пусковых токов асинхронных электродвигателей, что позволяет существенно продлить срок службы двигателя. Устройство плавного пуска используется в задачах, где не требуется управлять скоростью вращения или моментом электродвигателя. При этом для двигателей одинаковой мощности устройство плавного пуска дешевле частотного преобразователя.Сервопривод
Устройство позволяет точно контролировать угловое положение, скорость и ускорение исполнительного механизма посредством управления синхронным электродвигателем (обычно СДПМ).Контроллеры бесколлекторных двигателей Сервосила
Контроллеры бесколлекторных двигателей
Контроллеры СЕРВОСИЛА — это встраиваемые блоки управления для сервоприводов и тяговых электроприводов. Контроллеры превращают любой бесколлекторный электродвигатель в сервопривод или в интеллектуальный тяговый электропривод.
Контроллеры предназначены для управления бесколлекторными двигателями (PMSM, BLDC) любых производителей в сочетании с различными энкодерами абсолютного положения вала (BISS-C, SSI, SPI, ШИМ, квадратурный) или без них. Для подключения к управляющим компьютерам АСУ или к бортовым системам управления контроллеры предоставляют интерфейсы управления CAN и USB 2.0
Компания Сервосила изначально разработала данные контроллеры для применения в своих собственных продуктах — руках-манипуляторах и сервоприводах. Технология этих контроллеров прошла несколько итераций разработки и совершенствования и включила в себя значительный опыт, накопленный компанией в процессе эксплуатации своих роботов в различных, зачастую экстремальных, условиях. С тех пор контроллеры СЕРВОСИЛА нашли широкое применение в самых различных отраслях промышленности и науки, - везде, где требуется компьютерное управление бесколлекторными двигателями.Контроллеры бесколлекторных двигателей поставляются в двух исполнениях - плата прямоугольной формы (модель SC-25R) и плата круглой формы (модель SC-25C). Данные модели совершенно идентичны по интерфейсам и возможностям и отличаются только формой плат. Максимальный ток фазы двигателя - 25А.
Основными областями применения данных контроллеров бесколлекторных двигателей являются:
- сервомеханизмы, сервоприводы,
- тяговые электроприводы,
- АСУ ТП, промышленные линии, конвейеры, насосы,
- робототехнические устройства,
- интеллектуальное торговое оборудование,
- автоматизированное складское оборудование,
- испытательные стенды с компьютерным управлением,
- системы измерения и автоматической диагностики,
- тяговые электроприводы различных мобильных шасси,
- станки с ЧПУ,
- системы компьютерного зрения.
Поддерживаемые типы двигателей (любых производителей):
- Бесколлекторные (PMSM и BLDC), в том числе Maxon, Dunker и других.
- Бездатчиковые и с датчиками Холла (Sensorless и Sensored).
- Со встроенными энкодерами и с внешними энкодерами.
- Коллекторные (до 2шт одновременно) и соленоиды.
- Квадратурный интерфейс с индекс-сигналом,
- BISS-C интерфейс (в том числе к магнитным датчикам фирмы RLS),
- SSI интерфейс,
- ШИМ интерфейс,
- SPI интерфейс.
Датчики абсолютного положения вала («энкодеры») применяются в различных режимах сервоуправления, а также для поддержания плавного движения вала на низких скоростях вращения. Если энкодер в электроприводе отсутствует, то для таких случаев контроллеры поддерживают режимы бездатчикового управления (sensorless control) и управления по датчикам Холла (sensored control), а также серворежимы direct control, в которых энкодеры могут не требоваться.
Если энкодер в приводе присутствует, то контроллеры используют его, когда это имеет смысл. Если энкодер не подключен, то контроллеры могут работать и без него, но, возможно, в упрощенном режиме работы.
Подключение двигателей, датчиков положения вала, датчиков Холла и управляющих шин CANbus и USB 2.0 производится:- либо через штатные разъемы на платах контроллеров,
- либо посредством припайки кабелей в специально предусмотренные отверстия на платах, чем обеспечивается виброустойчивость соединений.
Конструктивно разъемы для подключения кабелей расположены только с одной из сторон плат; тыльная сторона плат не имеет разъемов и предназначена для подключения теплоотводного радиатора или для монтажа платы напрямую на корпус электропривода, использующегося для отвода тепла от платы.
Контроллеры не имеют разъемов, выходящих «в сторону»; все разъемы имеют только ориентацию «вверх». Это сделано для облегчения интеграции контроллеров внутрь корпусов устройств, таких как сервоприводы цилиндрической формы, или в отсеки электрооборудования небольших габаритов.
Предусмотрен механизм для обновления прошивки плат через порт RS232.
Режимы управления
В контроллерах реализованы следующие режимы управления бесколлекторными двигателями:- Стабилизация выходного момента на валу (ETC: Electronic Torque Control). Применяется для точного управления силой, с которой электропривод воздействует на нагрузку, например, в испытательных стендах, АСУ ТП или в шагающих роботах.
- Стабилизация скорости вращения вала (ESC: Electronic Speed Control). Применяется для поддержания заданной скорости вращения двигателя, вне зависимости от меняющейся внешней нагрузки, например, в тяговых электроприводах конвейеров, насосов или в шасси мобильных роботов. Контроллер автоматически увеличивает или уменьшает момент на валу для того, чтоб поддерживать скорость вращения вала постоянной.
- Сервоуправление (Servo Control) — поворот до заданного положения вала и последующее удержание вала с использованием датчика положения вала (энкодера) через редуктор или напрямую. Применяется в робототехнических руках-манипуляторах, АСУ ТП, станках с ЧПУ и любых других устройствах, где необходимо повернуть вал двигателя на заданный угол, а затем поддерживать положение при изменяющейся внешней нагрузке. В зависимости от подключенного энкодера положения вала обеспечивается точность поворота сервопривода до 20 бит.
- Direct Drive — точное управление положением вала посредством прямого позиционирования магнитного поля статора электродвигателя, в том числе при отсутствии редуктора в электроприводе. Применяется в системах компьютерного зрения, станках с ЧПУ, линейных двигателях, - везде где требуется максимальная точность управления положением без редукторов. В этом режиме электропривод на бесколлекторном двигателе может заменить шаговые двигатели при значительном улучшении точности.
- Тормоз вала («блокировка вращения»), - блокировка вращения вала вне зависимости от воздействия внешних нагрузок, например, для фиксации остановленного конвейера или для торможения колес мобильного шасси, стоящего «на горке». Блокировка происходит только работой бесколлекторного двигателя без применения каких-либо дополнительных тормозных устройств. Для блокировки вала применяется метод, минимизируещий потребление электрической энергии.
- Рекуперация энергии в батарею. Если контроллер питается от батареи, то он способен «пропускать» ток обратно в батарею тогда, когда электродвигатель работает в режиме электрогенератора, например, при торможении мобильного шасси. При этом возможно программное управление силой тока, идущего в батарею. Этот режим также применяется в системах «стартер-генератор» в сочетании с двигателями внутреннего сгорания (ДВС), в которых после запуска ДВС электродвигатель переходит в режим электрогенератора.
- Direct Drive Control,
- Field Oriented Control (FOC),
- с Back-EMF Observer и Hall Sensors Observer,
- с функцией Q-D axis coupling compensation для гладкости хода,
- с опциональным field weakening для достижения максимальных скоростей вращения,
- с интеллектуальными алгоритмами защиты
- и управления динамикой электродвигателя,
- и автоматическим определением характеристик двигателя и привода.
Реализованный набор алгоритмов обеспечивает динамическую устойчивость и малошумность работы электродвигателя, а также достижение максимального момента или максимальной скорости вращения вала (в зависимости от задачи) при оптимизации энергопотребления и обеспечении защиты электродвигателя от перегрева, а редуктора от поломки.
Возможность управлять коллекторными двигателями и соленоидами посредством силовой ШИМ - это вспомогательная функция данных контроллеров, спроектированых прежде всего для управления бесколлекторными двигателями. Для коллекторных двигателей (в отличие от бесколлекторных) реализовано только управление без обратной связи (open loop). При этом при желании можно управлять двумя коллекторными двигателями одновременно (и даже тремя коллекторными двигателями при определенных ограничениях). Также с помощью данных контроллеров можно управлять соленоидами.
Автонастройка
Для облегчения настройки контроллера под выбранный электродвигатель предусмотрен режим автонастройки, в котором автоматически определяются основные характеристики бесколлекторного электродвигателя и вычисляются оптимальные настройки законов управления. Эта функция значительно упрощает интеграцию контроллера с новыми бесколлекторными двигателями, если даже характеристики двигателя точно не известны по каким-либо причинам («утерян datasheet»).Интерфейсы программного управления
Предусмотрены следующие интерфейсы для интеграции с управляющими компьютерами или бортовыми системами управления:- Шина CAN с протоколом верхнего уровня CANopen. Контроллеры имеют два порта CANbus для облегчения построения «гирлянды» из контроллеров. До 126 контроллеров СЕРВОСИЛА могут быть подключены к единой шине CANbus. Это применяется для построения АСУ, управляющих множеством электроприводов одновременно, или в робототехнических системах с большим числом степеней свободы.
- Порт USB 2.0, который автоматически инициализируется, как виртуальный COM-порт в Windows 10, 8 и в Linux. Установка специальных драйверов не требуется ни в Windows, ни в Linux. Порт USB 2.0 у контроллеров СЕРВОСИЛА удобен тем, что позволяет управлять электродвигателями с помощью обычных персональных компьютеров или их промышленных вариантов, например, на испытательных стендах или автоматизированных системах контроля качества. Контроллеры СЕРВОСИЛА способны выполнять функцию USB-в-CAN шлюза («переходника USB2CAN») для обеспечения доступа управляющих компьютеров к сети CAN. Этот «переходник» работает как в Windows 10, 8, так и в Linux.
К Windows 10/8/7 контроллеры СЕРВОСИЛА подключаются через интерфейс USB 2.0, который автоматически определяется, как виртуальный COM-порт. Управляющие пользовательские программы, работающие под Windows, могут посылать текстовые команды в контроллер СЕРВОСИЛА через этот виртуальный COM-порт, а также получать обратно телеметрию в текстовом виде. Обмен данными происходит через стандартный текстовый протокол SLCAN.
Подключенный по USB 2.0 контроллер также выполняет роль USB-to-CAN шлюза и позволяет обеспечить доступ управляющих компьютеров с ОС Windows или ОС Linux ко всей сети CANbus. Таким образом, через единый интерфейс USB 2.0 к компьютеру с ОС Windows или Linux можно подключить «гирлянду» контроллеров СЕРВОСИЛА для управления целым комплексом электроприводов, например, в составе испытательного стенда, АСУ ТП или мобильного робота, а также любые другие устройства, поддерживающие шину CANbus, например, инерциальные датчики или GPS приемник.
К ОС Linux контроллеры СЕРВОСИЛА подключаются либо по интерфейсу CAN, либо по интерфейсу USB 2.0. В случае подключения по CANbus управляющие пользовательские программы могут использовать стандартный Linux SocketCAN API для посылки команд в контроллеры СЕРВОСИЛА и для получения телеметрии в обратном направлении. В сети Интернет можно найти примеры исходного кода множества программ, работающих через SocketCAN API.
Если же контроллер СЕРВОСИЛА подключен к Linux через интерфейс USB 2.0 (а не через CANbus), то контроллер идентифицируется в Linux, как виртуальный COM-порт, также, как и в ОС Windows. В этом случае управляющие пользовательские программы могут использовать либо стандартный Linux SocketCAN API через встроенный в Linux драйвер SLCANd, либо же работать с виртуальным COM-портом напрямую с использованием стандартного текстового протокола команд SLCAN.
При подключении через USB 2.0 к ОС Linux контроллер также может выполнять функцию USB-to-CAN шлюза и обеспечить доступ ОС Linux ко всей сети CANbus. Эта функция полезна в случае, если управляющая компьютерная система с ОС Linux не имеет своего собственного физического CANbus порта. В этом случае контроллеры СЕРВОСИЛА могут играть вспомогательную роль интерфейсного адаптера USB-в-CANbus.
Для разработки программ, управляющих контроллерами СЕРВОСИЛА через CAN или USB 2.0, в общем случае не требуются какие-либо специализированные библиотеки, SDK или средства разработки кроме тех, которые уже имеются в стандартных ОС Linux и Windows. Разрабатывать программы можно на языках C/C++, Java, Python, MATLAB, или любых других, которые могут работать с виртуальными COM-портами, со стандартным SocketCAN API в Linux, или же программных пакетов или ПЛК, которые уже имеют встроенную поддержку CANopen, например, LabView.
Программное обеспечение "Сервоскоп"
В комплект поставки входит программное обеспечение «Сервоскоп», которое автоматизирует процесс настройки контроллеров под конкретный электродвигатель и позволяет строить графики и получать отладочную телеметрию с электроприводов по сети CANbus или USB 2.0. Данное графическое программное обеспечение работает как под ОС Windows 10/8, так и под ОС Linux, в том числе, на популярных дистрибутивах Debian и Ubuntu. Установка драйверов не требуется.
Симулятор электроприводов
Для упрощения отладки пользовательского управляющего программного обеспечения в комплект поставки входит программный симулятор контроллера СЕРВОСИЛА. Программный симулятор распространяется бесплатно в составе программного обеспечения «Сервоскоп». Этот симулятор полностью воспроизводит управляющий интерфейс CANbus/CANopen контроллеров СЕРВОСИЛА и позволяет отлаживать пользовательское программное обеспечение управления электроприводом без риска повредить реальный электродвигатель или редуктор электропривода.
Технические характеристики
| Параметр | Значение |
|---|---|
| Поддерживаемые типы двигателей | Бесколлекторые (brushless): PMSM, BLDC. Коллекторные (brushed): только open loop режим. Соленоиды: только open loop режим. |
| Максимальный ток через фазу двигателя | 25 А (желательно с радиатором) |
| Номинальный (рекомендуемый) ток через фазу двигателя | 15 А (желательно с радиатором, но обычно не требуется) 12 А (без радиатора) |
| Входное напряжение питания | 7-60 V DC |
| Режимы управления бесколлекторными двигателями | Стабилизация момента на валу. Стабилизация скорости (ESC). Сервоуправление. Прямое управление (Direct Drive). Тормоз вала. Рекуперация (электрогенератор). Системная идентификция (автонастройка). |
| Встроенные алгоритмы управления бесколлекторными двигателями | Field-Oriented Control (FOC), EMF Observer, Hall Sensors Observer, D-Q axis Coupling Compensation, Field Weakening, Защиты, Управление динамикой разгона-торможения. |
| Функция автонастройки под электродвигатель | Есть |
| Интерфейсы к датчикам положения вала (энкодерам) | Квадратурный с индексным сигналом, BISS/C, SSI, ШИМ, SPI |
| Максимальное разрешение датчика положения вала | 20 бит |
| Встроенный шлюз сетей управления | USB-to-CANbus шлюз Поддерживаются 11-битные и 29-битные идентификаторы шины CANbus. |
| Управляющие интерфейсы | Шина CAN: протокол CANopen с 11-битными идентификаторами. USB 2.0: виртуальный COM-порт с текстовым протоколом SLCAN. |
| Количество последовательно подключенных контроллеров («гирлянда») в единой цепочке управления и питания: | До 127 шт через шину CANbus. До 16 шт через встроенный USB-to-CANbus шлюз. |
| Терминальное сопротивление 120 Ом для шины CANbus | Есть. Включается-выключается посредством джампера. |
| Возможные варианты скорости передачи данных по шине CAN | 1 мбит/сек 500 кбит/сек 250 кбит/сек 125 кбит/сек 100 кбит/сек 50 кбит/сек |
| Количество CANbus портов | 2 шт (параллельные) |
| Количество USB 2.0 портов | 1 шт |
| Поддерживаемые операционные системы | Windows 10, 8 (драйвер не требуется) Linux (драйвер не требуется): Debian, Ubuntu, Astra Linux, Raspberry PI OS и другие. |
| Интерфейсы и API для программного управления | Linux SocketCAN API, CANopen, Текстовый протокол SLCAN через виртуальный COM-порт (USB2.0) для Windows 10, 8 и Linux. |
| Программный симулятор программного интерфейса CANbus контроллера для отладки управляющего программного обеспечения без двигателя | Есть |
| Габариты модели SC-25R (прямоугольной формы) | 68мм x 40мм x 16мм |
| Габариты модели SC-25С (круглой формы) | Диаметр 62 мм, высота 16 мм |
| Масса | ~50 гр (без радиатора) |
| Энергопотребление в режиме ожидания при неработающем двигателе | 120-180 мА |
Надежный 10kw контроллер двигателя для двигателей и электромобилей
Ознакомьтесь с полным ассортиментом мощных, надежных и эффективных. 10kw контроллер двигателя на Alibaba.com для обслуживания различных электрических приборов и двигателей электромобилей. Эти новаторские и продвинутые. 10kw контроллер двигателя - это ультрасовременные продукты, которые действуют как великолепные блоки управления приборами и имеют прочную конструкцию. Файл. 10kw контроллер двигателя, предлагаемые для продажи на сайте, имеют компактные размеры и содержат все необходимые стандартные функции. Эти продукты предлагаются на сайте ведущими поставщиками и оптовиками по конкурентоспособным ценам и доступным ценам.Профессионал. 10kw контроллер двигателя выставленные на продажу на сайте товары и аксессуары отличаются не только высоким качеством, чтобы прослужить долгое время, но и надежными с точки зрения производительности и устойчивости. Они энергоэффективны и могут грамотно управлять электроприборами в соответствии с вашими требованиями. Эти. 10kw контроллер двигателя обладают высокой масштабируемостью и могут быть полностью настроены в соответствии с требованиями заказчика. Эти. 10kw контроллер двигателя устойчивы к температуре и могут поставляться с различными наборами напряжений, начиная с 12 В.
На Alibaba.com вы можете выбирать между несколькими разновидностями. 10kw контроллер двигателя разных размеров, форм, цветов, функций и возможностей в зависимости от ваших требований. Эти. 10kw контроллер двигателя идеально подходят для электромобилей и оснащены такими функциями, как нулевой джиттер, защита от кражи, жесткий и плавный запуск и многое другое. Вы можете использовать их. 10kw контроллер двигателя для применения как в коммерческих, так и в промышленных целях благодаря превосходным двигателям постоянного тока и синусоидальным технологиям.
Купите эти продукты на Alibaba.com, ознакомившись с широким спектром. 10kw контроллер двигателя, который также соответствует вашему бюджету и требованиям. Эти сертифицированные ISO, SGS и CE продукты доступны как OEM, так и ODM для оптовых закупок. Вы также можете найти эти продукты, совместимые с солнечными приборами или приборами.
Контроллер электрического двигателя - это... Что такое Контроллер электрического двигателя?
| Информация в этой статье или некоторых её разделах устарела. Вы можете помочь проекту, обновив её и убрав после этого данный шаблон. |
Контро́ллер — многоступенчатый, многоцепной коммутационный аппарат с ручным управлением, предназначенный для изменения схемы главной цепи электрического двигателя или цепи возбуждения, включения и выключения электрической цепи с возможностью одновременно производить сложные переключения схемы управления с помощью одной рукоятки (маховика).
Барабанный контроллер
Барабанные контроллеры применяются для управления электрическим двигателем до 60 кВт (включение, выключение, изменение направления вращения и частоты вращения) при редких включениях (до 240 включений в час). Недостатком барабанного контроллера является невысокая износостойкость.
Конструкция барабанного контроллера
Барабанный контроллер состоит из вращающегося вала и группы неподвижных контактов. На изолированном валу крепятся металлические сегменты разного размера, расположенные под разными углами друг к другу и являющиеся подвижными контактами контроллера. Отдельные сегменты могут быть электрически соединены между собой.
Неподвижные контакты (контактные пальцы) крепятся на неподвижном основании и изолированы друг от друга. Каждый контактный палец соответствует сегменту вращающейся части контроллера. К ним подключаются внешние проводники.
При повороте вала контактные пальцы соприкасаются с сегментами в последовательности, определяемой взаимным расположением, размерами сегментов и наличием соединений между ними.
Кулачковый контроллер
Управляется с помощью рычага, число включений в час достигает 600. Особенностью является то, что включение происходит за счёт пружины, а выключения за счет кулачка, поэтому контакты разводятся даже при сваривании.
Плоский контроллер
Предназначены для плавного регулирования поля возбуждения крупных генераторов и для пуска двигателей большой мощности, так как имеют много ступеней для переключения. Управляется с помощью винтов, которые приводятся в движение с помощью электрического двигателя через червячную передачу. При ремонтных работах контроллер приводится в движение вручную, с помощью рукоятки. Недостаток — малая износостойкость.
См. также
Литература
- Касаткин А. С., Немцов М. В. Электротехника: Учебное пособие для вузов. — 4-е изд. — М.: Энергоатомиздат, 1983. — С. 424—426. — 440 с., ил. — 240 000 экз.
| Выходной Ток | 1.2 |
| Выходное Напряжение | 15 |
| Минимальная Рабочая Температура | -30 |
| Максимальная Рабочая Температура | 90 |
| Максимальное Напряжение Питания | 14 |
| Минимальное Напряжение Питания | 2.8 |
| Количество Выводов | 20 |
| Уровень Чувствительности к Влажности (MSL) | MSL 3 - 168 часов |
| Количество Выходов | 1 |
| Стиль Корпуса Привода | SSOP |
| Тип Мотора | Однофазный с Вентилятором |
| MSL | MSL 3 - 168 hours |
| No. of Pins | 20 |
| Operating Temperature Max | 90 |
| Operating Temperature Min | -30 |
| Supply Voltage Max | 14 |
| Supply Voltage Min | 2.8 |
| Output Current | 1.2 |
| Driver Case Style | SSOP |
| No. of Outputs | 1 |
| Output Voltage | 15 |
| Motor Type | Single Phase Fan Motor |
| Категория продукта | Контроллеры и драйверы двигателей / движения / заж |
| Подкатегория | PMIC - Power Management ICs |
| Размер фабричной упаковки | 2000 |
| Серия | LA6584JA |
| Тип продукта | Motor / Motion / Ignition Controllers Drivers |
| Торговая марка | ON Semiconductor |
| Упаковка | Reel, Cut Tape |
| Вес, г | 0.07 |
Драйверы и контроллеры шагового двигателя
Для управления приводами требуется специальный драйвер шагового двигателя
Драйвер представляет собой силовую часть со встроенным простейшим интерфейсом, основанным на комбинации ШАГ–НАПРАВЛЕНИЕ.
Драйвер шагового двигателя еще и усилитель мощности, который преобразует импульсы, получаемые от источника электрического тока, в перемещение вала. При этом каждый импульс вызывает перемещение вала на 1 шаг (или на 1 микрошаг).
Драйвер шагового двигателя снабжён специальной схемой, которая служит для выполнения трёх основных задач:
- Включать и выключать ток в обмотках, а также менять его направление. При выполнении этой задачи системы управления электроприводом работают без сбоев.
- Поддерживать заданное значение тока.
- Обеспечивать как можно более быстрое нарастание и спад тока для достижения требуемых скоростных характеристик. Скоростные характеристики в свою очередь качественным образом влияют на управление шаговым двигателем.
Драйверы подразделяются на несколько типов, каждый из которых определяет мощность вала двигателя.
Следует отметить, что современные технологии, по которым изготавливается привод шагового двигателя, постоянно совершенствуются. Смысл совершенствования в том, чтобы обеспечить получение наибольшего момента на валу при минимальных габаритах двигателя, широких скоростных возможностях, высокого КПД и улучшенной точности. Важным звеном этой технологии является применение микрошагового режима.
Кроме того, одной из основных деталей является контроллер управления шаговым двигателем. Как правило, контроллеры для шагового двигателя изготавливаются на базе промышленных микроконтроллеров и могут быть как программными, так и аппаратными. Программные контроллеры для шагового двигателя применяются тогда, когда круг решаемых ими задач небольшой. Цена такого программного контроллера намного ниже аппаратного.
Контроллеры для шагового двигателя могут предназначаться как для униполярных двигателей, так и для двигателей других типов. При этом средний ток обмотки может достигать 2,5 А.
Контроллер шагового двигателя представляет собой комплект из силовой части (драйвер) и устройство, расширяющее возможности управления двигателем (интеллектуальная часть).
Данный компонент шагового двигателя обладает рядом достоинств. Прежде всего, контроллер управления шаговым двигателем имеет возможность передавать сигналы ШАГ–НАПРАВЛЕНИЕ.
Преимущества использования контроллеров для шагового двигателя:
- Возможность подключения к компьютеру. В зависимости от модели и конструкции контроллер управления шаговым двигателем подключается к компьютеру и регулируется с его помощью.
- Многократное перепрограммирование. В настоящее время достаточно купить только один контроллер шагового двигателя. При этом при переориентации производства или расширении перечня задач его можно перепрограммировать для выполнения новых функций.
- Широкий модельный ряд контроллеров как отечественных, так и зарубежных производителей позволяет купить контроллер шагового двигателя с расширенными функциями. Контроллеры с расширенными функциями имеют в своем составе программируемый логический контроллер (привод работает в автономном режиме по записанной в него программе, это позволяет получить готовое устройство для выполнения определённого технологического процесса на основе одного только контроллера шагового двигателя).
Устройство управления электроприводом, оснащенное контроллером, решает следующие задачи:
- Достижение высокой точности. Это связано с конструкцией, благодаря которой устройства управления шаговыми двигателями делают до 20000 шагов за оборот за счет микрошага.
- Работа с программным обеспечением. К ним относятся производственные программы типа Kcam и Mach.
- Работа в различных режимах.
Устройства управления шаговыми двигателями могут функционировать как on-line (то есть подчиняясь командам компьютера) так и off-line (при помощи программы с внешнего устройства, например, флеш-накопителя). Применяется также совмещённый режим (он особенно выгоден при управлении одинаковыми процессами с меняющимися параметрами, управлении контрольными процедурами и опросе параметров, осуществляемом с вашего компьютера)
Блок управления шаговым двигателем.
Вместе с шаговым двигателем работает блок управления шаговым двигателем, который является источником тока для двигателя, осуществляет при необходимости дробление основного углового шага и выполняет коммутацию фаз двигателя. Блок управления обычно поддерживает как ручное, так и автоматическое управление электроприводами.
Современный блок управления электроприводом одновременно является и многофункциональным устройством – с возможностью программирования и синхронизации с другими устройствами, а также с возможностью включить автоматическое управление электроприводами. Существуют решения, при которых блок управления электроприводом программируемый.
В частности, блок управления шаговым двигателем может управляться с помощью компьютера. Подключение происходит через LPT-порт (в том числе и с программами для станков с ЧПУ), через COM-порт – получая специальные команды для определения характера (и алгоритма) движения шагового двигателя, в автономном автоматическом режиме без помощи компьютера или внешнего контроллера (если требуется автоматическое управление электроприводами технологических процессов) или в ручном режиме, когда скорость движения регулируется потенциометром, а направление движения – датчиком реверса.
Учитывая разнообразие шаговых двигателей, их управление зависит от типа самого двигателя. И в соответствии с этим и выбирается блок управления электроприводом.
Биполярный привод шагового двигателя и его управление.
Помимо биполярных двигателей существуют так же униполярные двигатели, обмотки которых имеют средние отводы, служащие для подключения к общему проводу – «земле».
Полный оборот выходного вала двигателя состоит из N-ного количества шагов. Большинство двигателей рассчитаны на шаг 1,8 градуса, таким образом, полный оборот выходного вала будет совершён за 360/1,8 = 200 шагов.
Привод шагового двигателя меняет положение выходного вала на один шаг при подаче на одну из обмоток напряжения питания. Направление протекания тока через обмотку при этом указывает на направление вращения. Для совершения следующего шага необходимо выключить первую обмотку и подать питание на вторую, соблюдая направление тока через обмотку. Итого за 100 полных циклов поочерёдной запитки обмоток мотор сделает ровно один оборот выходного вала.
Поэтому для направления токов требуются устройства управления шаговыми двигателями.
Способы управления электроприводом.
Для управления приводами существует ряд способов, применяемых в зависимости от характера решаемых задач и назначения шагового двигателя в разных областях промышленности.
- Одиночные импульсы. Данный способ управления электроприводом считается самым простым. Он основан на одновременном подключении только одной катушки. Для совершения полного оборота ротора требуется 48 импульсов. При этом каждый перемещает ротор на 7,5 градусов.
- Двойной импульс. В этом случае системы управления шаговыми двигателями основаны на одновременном подключении двух соседних катушек. Для полного оборота ротора требуется также 48 импульсов. Каждый импульс перемещает ротор на 7,5 градусов.
- Комбинированные импульсы. Суть в том, что устройство управления электроприводом чередует первый и второй способы. Двигателю требуется 96 импульсов, чтобы совершить один оборот. Каждый импульс перемещает ротор на 3,75 градуса.
Остались вопросы касательно управления электроприводом? Задайте их сотрудникам компании «Степмотор» и примите решение о приобретении системы управления шаговыми двигателями! Ведь купить контроллер шагового двигателя именно у нас – значит, получить качественный промышленный продукт за разумную цену.
Контроллер асинхронного двигателя SS-22 (регулятор скорости)
Регулятор скорости SS-22
Контроллер асинхронного двигателя SS-22 предназначен для управления скоростью однофазным электродвигателем со встроенной обратной связью (тахогенератором) типа YT и подобных двигателей и мотор-редукторов других производителей (RGN, RGU и т.д.) Подходит для всех серий регулируемых приводов мощностью от 6 Вт до 250 Вт с однофазным напряжением питания.
Комплект поставки включает в себя регулятор скорости SS-22, потенциометр 20 кОм и небольшую панель-шкалу для крепления на приборную панель. Фазосдвигающая ёмкость подключается в клеммы блока SS-22 (конденсатор не входит в комплект). Контроллер позволяет только регулировать обороты мотора, направление вращения вала электродвигателя задается переключением обмоток при подключении к контроллеру. Схема управления универсальная - подходит для моторов любой мощности с пятью выводами (три - обмотки двигателя, два - тахогенератор) с током потребления до 5 Ампер. В блоке на передней (верхней) грани есть подстроечный потенциометр - в случае, если регулировать обороты часто не нужно и есть доступ к контроллеру, можно обойтись встроенным потенциометром - выкрутить необходимую скорость отверткой, для продолжительной эксплуатации с более удобным способом управления скоростью используется внешний потенциометр.
Блок предназначен для монтажа на рейку DIN 35 мм и имеет компактные размеры (80 x 40 x 60 мм). Такие малогабаритные регуляторы скорости чрезвычайно распространены в китайском оборудовании - в шкафах управления станками, конвейерами, в печатных машинах, вендинговых автоматах, в пищевом оборудовании и т.д. Блок совместим с подобными регуляторами Oriental Motor, TWT и другими (обозначение speed control unit, control pack и т.д.)
Чертеж контроллера SS-22
Блок управления скоростью SS-22 производителя ZD Motor совместим с другими такими контроллерами с такой же маркировкой (speed control pack) других производителей (T.W.T., Clin (Xinling Electrical Co), Oriental Motor, SAMGOLD и другими. Будьте внимательны - для электродвигателей разных производиетелй цвета проводов на схеме подключения ниже могут не совпадать со схемой.
Схема подключения регулятора оборотов SS-22 к двигателю WANSHSIN
Информация о наличии, ценах и характеристиках оборудования Контроллер асинхронного двигателя SS-22 (регулятор скорости) обновлена 22.07.2021 в 14:50:52
Драйвер мотора исправил? Почини, не выбрасывай!
Ремонт компонентов электронной системы, к сожалению, не из дешевых. Можно даже сказать, что это невероятно дорого! Часто разговоры со «специалистами» начинаются с четырехзначных сумм! Для человека, разбирающегося в электронике, это просто шутка. Ведь элементы, из которых построены электронные компоненты, стоят копейки! Откуда такие непомерные цены?
Ответ довольно прост - по знаниям и умениям.На самом деле запчасти можно купить за небольшие деньги, но, не зная, как их правильно использовать, мы ничего не добьемся. Что еще хуже, даже «профессиональные» авторизованные мастерские не всегда нам помогут. Обычно их возможности ограничиваются чтением памяти ошибок компьютера. Даже если им удастся найти неисправность, они, скорее всего, заменят весь модуль. Читайте: самый дорогой способ его удалить! Контроллер двигателя может обойтись в мелочь 10 тысяч. PLN ... Что еще хуже, покупка драйверов для многих старых моделей автомобилей - это почти чудо - запчасти давно сняли с предложения.
К счастью, есть и другие, менее дорогие решения. Если в обычном сервисе диагностика «компьютер на замену», то поищем настоящих специалистов - автоэлектроника.Однако, прежде чем приступить к ремонту контроллера, следует тщательно проверить электрическую установку. Его выход из строя может вызвать те же симптомы, что и сломанный электронный модуль. Иногда случается, что короткие замыкания в установке или ее непрофессиональные модификации приводят к поломке компьютера. Подключая новую деталь в такой ситуации, мы рискуем ее быстрой гибелью.
Что можно отремонтировать?
Практически все - исключение составляют водители подушек безопасности.Даже если компания предлагает такую услугу, не рискуйте! А как насчет такого фиксированного драйвера? Подходит ли оно к чему? Абсолютно! Он ничем не отличается от нового и ничем не хуже. В мастерских автоэлектроники стоит недешево, но счет будет как минимум вдвое ниже, чем при замене комплектной детали. Например, диагностика и ремонт контроллера двигателя (в зависимости от СТО) стоит от 300 до 2000 злотых. Что интересно, стоимость этих деталей обычно не превышает ста злотых.Платим за знания!
Где вышла из строя электроника?
Часто они возникают в результате заводского дефекта компонента, но может быть много причин для отказа.В Польше они обычно происходят при непрофессиональной модификации автомобиля (установка газовых установок и сигнализаций!) И тюнинге. Продолжительная езда на сломанном автомобиле, например, с поврежденной катушкой зажигания или поврежденными датчиками, также может быть опасной. Очень часто виноваты и неаккуратные жестянщики - неквалифицированная техника иногда протекает, а вода - враг электроники номер один!
Как узнать, что с компьютером что-то не так?
Неисправность управляющего компьютера может проявляться по-разному.Иногда двигатель просто не заводится и отказывается сотрудничать. В другой ситуации поломка контроллера сказывается на неравномерной работе двигателя, «пропусках зажигания», повышении расхода топлива при снижении производительности. Обычно о поломке контроллера сигнализирует желтый индикатор на панели приборов - к сожалению, иногда все равно выходит из строя система внутренней диагностики.
.КОМПЬЮТЕРЫ-КОНТРОЛЛЕРЫ ДВИГАТЕЛЯ - Autotronika.pl
Количество товаров на странице: 362412
Отображение товаров:Компьютер 8200278378 8200278376 ...
Цена: 650.00 PLN
КОМПЬЮТЕРНЫЙ КОНТРОЛЛЕР RENAULT S113717205B ...
Цена: 200.00 PLN
КОМПЬЮТЕРНЫЙ КОНТРОЛЛЕР RENAULT S113717115C ...
Цена: 200.00 PLN
КОМПЬЮТЕРНЫЙ КОНТРОЛЛЕР RENAULT S103717113D...
Цена: 200.00 PLN
КОМПЬЮТЕРНЫЙ КОНТРОЛЛЕР RENAULT S103717108R ...
Цена: 200.00 PLN
КОНТРОЛЛЕР ДВИГАТЕЛЯ AUDI: A6 ...
Цена: 450.00 PLN
PEUGEOT 307 2.0 hdi ...
Цена: 399.00 PLN
КОНТРОЛЛЕР ДВИГАТЕЛЯ RENAULT Вместимость ... 9000 3
Цена: 200.00 PLN
БЕЗ ИММО КОНТРОЛЛЕР ДВИГАТЕЛЯ RENAULT...
Цена: 200.00 PLN
БЕЗ ИММО КОНТРОЛЛЕР ДВИГАТЕЛЯ RENAULT ... 9000 3
Цена: 200.00 PLN
БЕЗ ИММО КОНТРОЛЛЕР ДВИГАТЕЛЯ RENAULT ... 9000 3
Цена: 200.00 PLN
БЕЗ ИММО КОНТРОЛЛЕР ДВИГАТЕЛЯ ... 9000 3
Цена: 200.00 PLN
БЕЗ ИММО КОНТРОЛЛЕР ДВИГАТЕЛЯ ...
Цена: 200.00 PLN
PEUGEOT 307 2.0 hdi КОМПЬЮТЕР edc15c2 ...
Цена: 600.00 PLN
КОНТРОЛЛЕР ДВИГАТЕЛЯ RENAULT Вместимость ... 9000 3
Цена: 200.00 PLN
КОМПЬЮТЕР / КОНТРОЛЛЕР ДВИГАТЕЛЯ ДЛЯ ...
Цена: 800.00 PLN
КОНТРОЛЛЕР КОМПЬЮТЕРНОГО ДВИГАТЕЛЯ S100811102 ...
Цена: 40,00 PLN
КОНТРОЛЛЕР ДВИГАТЕЛЯ RENAULT Вместимость...
Цена: 200.00 PLN
КОНТРОЛЛЕР ДВИГАТЕЛЯ RENAULT Вместимость ... 9000 3
Цена: 200.00 PLN
БЕЗ ИММО КОНТРОЛЛЕР ДВИГАТЕЛЯ RENAULT ... 9000 3
Цена: 200.00 PLN
КОНТРОЛЛЕР ДВИГАТЕЛЯ RENAULT Вместимость ... 9000 3
Цена: 200.00 PLN
БЕЗ ИММО КОНТРОЛЛЕР ДВИГАТЕЛЯ ... 9000 3
Цена: 200.00 PLN
КОНТРОЛЛЕР ДВИГАТЕЛЯ RENAULT CLIO...
Цена: 150.00 PLN
КОНТРОЛЛЕР ДВИГАТЕЛЯ RENAULT LAGUNA ...
Цена: 200.00 PLN
КОНТРОЛЛЕР ДВИГАТЕЛЯ RENAULT Вместимость ... 9000 3
Цена: 200.00 PLN
КОНТРОЛЛЕР ДВИГАТЕЛЯ RENAULT Вместимость ... 9000 3
Цена: 200.00 PLN
БЕЗ ИММО КОНТРОЛЛЕР ДВИГАТЕЛЯ RENAULT ... 9000 3
Цена: 200.00 PLN
БЕЗ ИММО Объем двигателя 0.8...
Цена: 200.00 PLN
БЕЗ ИММО КОНТРОЛЛЕР ДВИГАТЕЛЯ ... 9000 3
Цена: 200.00 PLN
БЕЗ ИММО КОНТРОЛЛЕР ДВИГАТЕЛЯ ... 9000 3
Цена: 200.00 PLN
БЕЗ ИММО КОНТРОЛЛЕР ДВИГАТЕЛЯ ... 9000 3
Цена: 200.00 PLN
КОНТРОЛЛЕР ДВИГАТЕЛЯ RENAULT Вместимость...
Цена: 200.00 PLN
КОМПЬЮТЕРНЫЙ КОНТРОЛЛЕР RENAULT S103717108R ...
Цена: 200.00 PLN
КОМПЬЮТЕРНЫЙ КОНТРОЛЛЕР RENAULT S103717115B ...
Цена: 200.00 PLN
КОМПЬЮТЕРНЫЙ КОНТРОЛЛЕР RENAULT S103717205C ...
Цена: 200.00 PLN
КОМПЬЮТЕРНЫЙ КОНТРОЛЛЕР RENAULT S105300203B...
Цена: 200.00 PLN
.Контроллер двигателя • Peugeot • Citroen • Renault
Настройки файлов cookie
Здесь вы можете определить свои предпочтения в отношении использования нами файлов cookie.Требуется для работы страницы
Эти файлы cookie необходимы для работы нашего веб-сайта, поэтому вы не можете их отключить.
Функциональный
Эти файлы позволяют использовать другие функции веб-сайта (кроме необходимых для его работы).Их включение предоставит вам доступ ко всем функциям веб-сайта.
Аналитический
Эти файлы позволяют нам анализировать наш интернет-магазин, что может способствовать его лучшему функционированию и адаптации к потребностям пользователей.
Продавцы аналитического программного обеспечения
Эти файлы используются поставщиком программного обеспечения, под управлением которого работает наш магазин.Они не объединяются с другими данными, введенными вами в магазине. Цель сбора этих файлов - выполнить анализ, который будет способствовать развитию программного обеспечения. Вы можете узнать больше об этом в политике Shoper в отношении файлов cookie.
Маркетинг
Благодаря этим файлам мы можем проводить маркетинговую деятельность.
.Контроллер мотора - сила в электронном мозгу! / Статьи - Автомобильные статьи и советы
Ни при каких обстоятельствах нельзя недооценивать роль компьютера, контролирующего работу приводного устройства. Он определяет расход топлива, мощность и производительность, а в современных автомобилях способен обездвижить технически эффективный двигатель. Сегодня мы расскажем, как изменился функционал устройства, каковы его самые популярные неисправности и как их исправить.
История контроллеров, установленных на двигателе, началась в 1980-х годах.Однако три десятилетия назад эти устройства были по-спартански простыми. В основном они определяли частоту зажигания и впрыска. Со временем, когда электронизация все более и более смело выходила на автомобильный рынок, функциональность компьютеров стала расширяться. Добавлено, среди прочего возможность комплексного управления двигателем, анализа информации с различных датчиков или диагностического модуля. Контроллеры превратились из простых схем в миниатюрные ПК, оснащенные процессором, памятью, программным обеспечением и аналого-цифровыми преобразователями.
Повышение важности «мозга» двигателя привело к настоящей революции в мастерских. Механика превратилась в электронику, а механика - в электромеханику. В результате невозможно обслуживать современный автомобиль без связи с устройством управления, к тому же интеллектуальные технологии могут затруднить выполнение простейших задач. Примеры? В некоторых моделях автомобилей после заливки старого масла или отсоединения проводов зажигания срабатывает автоматический замок зажигания.Его можно удалить только с помощью диагностического компьютера. Бывают также случаи, когда, хотя движок технически эффективен, накопление ошибок в памяти драйвера делает его непригодным для использования.Проверь двигатель - вовремя отреагируй!
Признаков отказа компьютера управления двигателем может быть множество. Самые распространенные слова - это неравномерная работа приводного агрегата, увеличение расхода топлива, плохая производительность и малая мощность, препятствие запуску двигателя, появление на панели приборов индикатора проверки двигателя или включение аварийного режима.Наиболее распространенных источников неисправностей драйверов два. Проблемы вызваны производственными дефектами или накоплением ошибок в памяти. Большое количество ошибок возникает из-за сбоев или периодических проблем с периферийными устройствами, такими как датчики.
Выбери свою машинуи уточняйте цены в нашем предложении!
Однако гораздо реже бывает, что неисправность заключается в неправильной установке аксессуаров, ошибках, допущенных во время настройки микросхем или загрузке неверных карт, неисправности установки LPG, повреждении жгутов проводов, сгоревших усилителях мощности, выходе из строя микропроцессора или выходных каскадов.Обнаружив проблемы с контроллером, водитель должен сразу увидеть электромеханику. Перенос срока ремонта может привести к серьезным повреждениям. В худшем случае в двигателе сгорят поршни.
В ситуации, когда виноват накопление ошибок или необходимо загрузить новое программное обеспечение, автовладельцу не стоит опасаться чрезмерных затрат. Обычно ремонт вне сети ASO стоит не более 300-400 злотых.Настоящая проблема - повреждение внутренней электроники. Когда водитель решает заменить водителя, выполнение процедуры будет означать расходы от нескольких до нескольких тысяч злотых. Окончательная цена зависит от того, отправится ли машина на авторизованный СТО или в независимую мастерскую.
Конечно, вы также можете отремонтировать свой компьютер. В зависимости от масштаба неисправности счет электромеханика будет составлять от 700-800 до двух тысяч злотых.Выбирая специалиста, которому будет поручена регенерация контроллера, следует учитывать не только ценовой критерий. Только авторитетная мастерская может гарантировать эффективное устранение проблемы.
Иногда механики предлагают клиентам установить подержанный контроллер. Решение позволяет значительно снизить стоимость ремонта, но несет в себе определенный риск. Во-первых, никогда нельзя быть уверенным, что устройство не повреждено. Во-вторых, это принципиальный вопрос совместимости. В старых автомобилях достаточно перепрограммировать иммобилайзер, чтобы компьютер работал нормально.В современных моделях на один мотоцикл устанавливается несколько моделей драйверов. Если вы купите не тот, двигатель снова будет обездвижен.
.Драйвер шагового двигателя - EBMiA.pl
Напряжение питания мин-тип-макс [В постоянного тока]
Напряжение питания мин-тип-макс [В постоянного тока]
ПИК фазного тока [A] мин.
ПИК фазного тока [A] мин.
Пиковый фазный ток [A] макс.
Пиковый фазный ток [A] макс.
Шаги макс.
Деление шагов мин.
Текущее регулирование
Настраивается через ПК
Настраивается через ПК
Рекомендуется для двигателей [Нм]
Рекомендовано для двигателей [Нм]
Наличие
Производитель
Цена
Новые и рекомендуемые
.Ремонт контроллеров двигателя - Eltronic Rumia
.Контроллеры двигателей
EDC16
Ремонт контроллера двигателя EDC16! Современные автомобили пронизаны электроникой. Электронные системы контролируют работу двигателя, тормозов, внутренней отделки и т. Д. Хуже того, если что-то ломается, не обманывайтесь, ведь водители ...
Fiat
блоки управления двигателемНАИБОЛЕЕ РАСПРОСТРАНЕННЫЕ ПРОБЛЕМЫ ПОЯВЛЯЮТСЯ ПОСЛЕ ПРОГРЕВА ДВИГАТЕЛЯ ИЛИ ПРИ БОЛЕЕ РАССТОЯНИИ. неравномерная работа двигателя, один или несколько цилиндров не горит, ошибка катушки или отсутствие напряжения на одной из катушек зажигания, машина не заводится....
Другое
https://eltronic24.pl/naprawa-kasety-sterownik-scania/
Opel
контроллеры двигателя Регенерация блока управления двигателем Opel Ремонт контроллера двигателя Opel: Delphi Delco, Delco Old, EDC15, EDC16U1, Siemens Simtec 70, Simtec 71, установлен в автомобиле Opel: Astra, Corsa, ...
Неисправности в блоке управления двигателем Опель
Симптомы поломки контроллера двигателя Опель: Повреждение происходит после прогрева, выхода из строя топливного насоса, выхода из строя дроссельной заслонки, выхода из строя контроллера двигателя.Пример описания неисправности контроллера двигателя: Опель Астра G 1.6 16V 20 ...
Ремонт контроллера мотора
Если ваш контроллер двигателя поврежден, наша компания может вам помочь. Мы устраняем заводские неисправности контроллеров, которые повреждены в результате неправильной установки, например, на блоке двигателя. Контроллер, установленный непосредственно в моторном отсеке, подвержен более быстрому износу. Если мы не отремонтируем искомый драйвер, есть список драйверов, которые мы можем клонировать.

Ремонт контроллера двигателя Опель заключается в замене электронных компонентов контроллера на новые. Только ремонт блока управления двигателем Opel дает гарантию 2 года..Контроллер двигателя
DIY: метод измерения плотности скорости в управлении дозой топлива в двигателях внутреннего сгорания
Похоже, что построить собственный контроллер ДВС - сложная задача. Как это на самом деле? Давай проверим.
Большинство из нас, вероятно, более или менее знает, как работает двигатель внутреннего сгорания. Смесь воздуха и топлива поступает в камеру сгорания (цилиндр), где воспламеняется от искры свечи зажигания или воспламеняется автоматически (дизельное топливо).Воспламенение смеси вызывает повышение давления в цилиндре, что создает крутящий момент на коленчатом валу и, в конечном итоге, приводит в движение двигатель. Легкий.
Если мы ограничим группу двигателей только теми, которые работают на бензине, естественно возникнут следующие вопросы:
- Как узнать, сколько топлива мне нужно доставить в двигатель?
- В какой момент загорается смесь?
Эта статья - попытка ответить на первый вопрос.
Подавляющее большинство современных автомобилей имеют систему впрыска топлива.Контроллер двигателя отвечает за передачу необходимых сигналов на форсунки. Он определяет правильные моменты открытия форсунок, в основном на основе измерения количества воздуха, поступающего в камеру сгорания. Существуют две популярные системы измерения расхода воздуха:
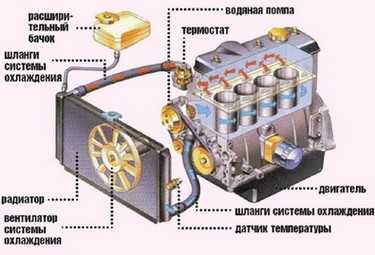
- Массовый расход воздуха - метод, основанный непосредственно на датчике массы проходящего воздуха, установленном перед впускным коллектором (датчик массового расхода воздуха). Изначально это были заслонки расходомеров.В настоящее время наиболее популярным решением является использование нагретой платиновой проволоки, температура которой поддерживается на постоянном уровне около 120 градусов Цельсия. Ток, необходимый для поддержания заданной температуры, с учетом множителей, определенных экспериментально, напрямую переводится в массу проходящего воздуха.
- Плотность оборотов - косвенный метод, предполагающий использование датчика давления и температуры воздуха, расположенного во впускном коллекторе.Он широко используется во многих контроллерах двигателей вторичного рынка.
Немного теории
Метод плотности скорости основан на уравнении идеального газа, известном из уроков физики и химии:
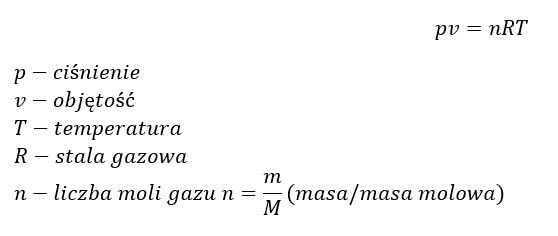
Дело кажется простым. Массу воздуха легко определить, зная давление (датчик) и температуру (датчик). Другие значения, такие как объем и молярная масса, конечно же, постоянные.
К сожалению, как всегда, теория прекрасна своей простотой; в то время как измерения, имеющиеся в нашем распоряжении, не позволяют нам использовать его напрямую, потому что:
- Датчик давления показывает давление в коллекторе, а не в самом баллоне.
- Мы также предполагаем, что цилиндр полностью заполнен свежим воздухом, не осталось выхлопных газов от предыдущего цикла сгорания
- Измеренная температура воздуха на самом деле является близким приближением к фактической температуре смеси в цилиндре .
Чтобы решить проблему расхождения между теорией и реальностью, алгоритм плотности скорости вводит концепцию, называемую объемной эффективностью (VE).Этот подход в основном решает проблемы, представленные в пунктах 1 и 2.
VE - коэффициент, определяющий эффективность наполнения цилиндра как отношение объема воздуха, фактически присутствующего в камере сгорания, к теоретическому объему, определенному путем измерения давления и температуры из уравнения идеального газа. Его значение выражается в процентах и зависит от давления, скорости вращения и конструкции самого двигателя.
Карта VE как функции давления и скорости двигателя является ключевым компонентом метода плотности скорости.Пример карты показан на рисунке 1.
Карта VE имеет дело с факторами p и v, температура остается. Плотность воздуха также зависит от температуры - чем она выше, тем меньше масса воздуха в данном объеме. Поэтому нужна другая карта - карта относительной плотности воздуха в зависимости от температуры.
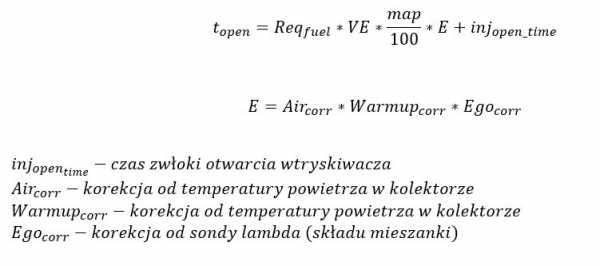
Принимая во внимание приведенные выше соображения и принимая во внимание определение выходного значения, интересного с точки зрения контроллера двигателя (то есть времени открытия форсунки), исходная формула выражается следующим образом.

Объясните появление постоянной Req топлива . Ну, этот параметр выражает время открытия форсунки, указанное для данного двигателя, чтобы получить стехиометрическую смесь при давлении 100 кПа, температуре и 100% объемном КПД. Это зависит от мощности двигателя и форсунок.
Strengths Плотность скорости:
- Датчик давления не ограничивает поток воздуха, в отличие от датчика массового расхода воздуха
- Датчики давления (МАР) очень быстро реагируют на изменения нагрузки двигателя (давления)
- Используемые датчики надежные
Слабые стороны Плотность скорости:
- Соответствующее сопоставление VE может занять много времени
- Модификации двигателя обычно изменяют объемный КПД и требуют коррекции карты VE
- Есть распределительные валы, которые не создают нужный вакуум или сильно пульсируют на холостом ходу, что является большой проблемой
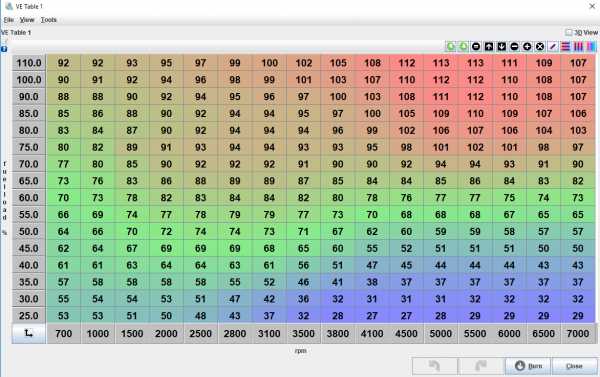
Рисунок 1.Примерная карта VE
Определение коэффициента Треб топливо
Предположим, это двухлитровый четырехцилиндровый бензиновый двигатель. Инжекторы имеют производительность 200 см 3 / мин при давлении 4 бара, и это давление также присутствует на рейке инжектора. Плотность бензина 750 г / 1000 см 90 102 3 90 103.
Определяем массу воздуха в баллоне (температура 20 ° С, давление 100кПа):
90 110
После преобразований единиц и несложных вычислений получаем:
Отношение воздушной массы к массе топлива AFR (соотношение воздух-топливо) в стехиометрической смеси, то есть той, в которой продукты полностью сгорают, для бензина составляет 14,7.Итак:
С учетом КПД форсунок и плотности бензина получаем:
Пример расчета времени открытия форсунки
С помощью параметра Req fuel мы можем определить время впрыска топлива для любых условий работы двигателя. Предположим, датчик MAP показывает давление 40 кПа, а частота вращения двигателя составляет 2000 об / мин. Используя карту VE с рисунка 1, мы можем легко вычислить: (предположим, что параметр Air плотность (T) = 1 )
Дополнительные поправочные коэффициенты
Исходная формула времени открытия форсунок должна быть дополнена дополнительными поправочными коэффициентами.В холодном двигателе наблюдается явление конденсации и конденсации паров топлива на стенках впускного коллектора и цилиндра. В результате состав смеси обедняется. Чтобы противодействовать этому, следует ввести фактор, увеличивающий дозу топлива в зависимости от температуры двигателя. При достижении рабочей температуры коэффициент не учитывается, он равен 1. Еще одна поправка - это компенсация от значения атмосферного давления. В связи с тем, что параметр Треб топливо определяется на основе нормированного давления 100 кПа, это значение необходимо пересчитать на текущее давление, значение которого уменьшается с увеличением высоты.Эту поправку часто упускают из виду, поскольку она требует наличия внешнего датчика давления или использования датчика, встроенного во впускной коллектор, перед запуском автомобиля.
Самым важным фактором является поправка от лямбда-зонда, т.е. датчика, расположенного в выпускном коллекторе. Задача датчика - обеспечить обратную связь о фактическом составе смеси (богатая или бедная).
Еще одним параметром, влияющим на длину импульса, является время открытия форсунки.Это зависит от напряжения, приложенного к катушке форсунки. Чем он выше, тем короче время открытия.
Наконец, с учетом вышеуказанных исправлений, формула выглядит так:
Сводка
На основе анализа алгоритма Speed Density мы узнали ответ на вопрос, как контроллер двигателя определяет время открытия форсунок. Математическая сторона метода несложная, и самая большая проблема - это правильный подбор карт и исправлений.В то же время мы узнали о ряде датчиков, которые необходимы для реализации этого алгоритма. Представленный метод определения дозы топлива используется во многих автономных контроллерах. Зная теоретические основы, мы можем сделать собственный контроллер двигателя.

Рисунок 2. Плата драйвера

Рисунок 3. Плата драйвера
.