Схема автопоезда
Пример построения схемы
Данные для схемы:
Автопоезд (Д×Ш×В, м): трехосный тягач + трехосный полуприцеп, 19,4 × 3 × 3,8
Осевые нагрузки, т: 6,15 – 7,25 – 7,25 – 6,4 – 6,4 – 6,4
Межосевые расстояния, м: 3,2 – 1,4 – 9,0 – 1,36 – 1,36
Ошиновка везде двускатная, кроме 1-й оси.
Груз (Д×Ш×В, м): 12 × 3 × 2,8
Свес груза за край погрузочной площадки, м: 1,0
Передний свес тягача, м: 1,33
Задний свес прицепа, м: 0,75
Построение схемы
1 При создании новой перевозки выбираем нужный автопоезд из справочника конфигураций.
2 В группе полей "Параметры осей" вводим данные по осям
3 В группе полей "Параметры транспортного средства вводим габариты автопоезда и груза"
4 В группе полей "Схема автопоезда" указываем свес груза
Для этого в Инспекторе объектов выбираем (a)Полуприцеп → (б)Груз → (в)задний свес и вводим значение.
В окне просмотра груз сдвинется на указанное значение.
Аналогичным образом указываем:
Задний свес прицепа ( Полуприцеп → Шасси → задний свес ) и
Передний свес тягача ( Седельный тягач → Кабина → Передний свес)
Нажмите кнопку на верхней панели инструментов, появится окно предварительного просмотра
5 Напечатайте схему, нажав на кнопку печати..
В примере даны минимальные настройки схемы.
В реальной схеме может потребоваться задание высоты погрузочной площадки, колеи и дорожного просвета, изображений груза и т.д. Всё это задается через параметры Инспектора объектов.
Деятельность / Министерство транспорта Ростовской области
В связи с переводом государственной услуги «Выдача специального разрешения тяжеловесного и (или) крупногабаритного транспортного средства» в электронный вид с октября 2021 года, согласование маршрута тяжеловесного и (или) крупногабаритного транспортного средства осуществляется в государственной информационной системе «Выдача специальных разрешений».
Консультации по вопросу предоставления вышеуказанной государственной услуги проводятся по электронной почте [email protected] и по конкретному телефонному номеру 8 (863) 295-54-27 с 9:00 до 13:00.
Министерством транспорта Ростовской области предоставляется государственная услуга:
«Выдача специального разрешения на движение по автомобильным дорогам (участкам автомобильных дорог) регионального или межмуниципального значения, по автомобильным дорогам местного значения, расположенным на территориях двух и более муниципальных образований, тяжеловесного и (или) крупногабаритного транспортного средства».
СПРАВОЧНАЯ ИНФОРМАЦИЯ
Государственная услуга предоставляется согласно административного регламента предоставления государственной услуги, утвержденного постановлением министерства транспорта Ростовской области от 07.09.2021 № 6. Скачать регламент
Государственная услуга предоставляется по адресу:
344019, г. Ростов-на-Дону, ул. Нижегородская, д.20/11, кабинет 302
телефон: (863) 295-54-27
Факс: (863) 253-95-76
электронный адрес: [email protected]
График работы Западного территориального отдела организации дорожных работ:
понедельник - четверг с 09:00 до 18:00, перерыв с 13:00 до 13:45
пятница с 09:00 до 16:45, перерыв с 13:00 до 13:45
Рекомендованный образец заполнения заявления Скачать
Образец заполнения заявления для сельскохозяйственной техники Скачать
Платежные поручения:
Государственная пошлина за выдачу разрешения Скачать
Возмещение вреда Скачать
РЕКОМЕНДОВАННЫЙ ОБРАЗЕЦ ЗАПОЛНЕНИЯ СХЕМЫ АВТОПОЕЗДА:
Вид сбоку (скачать)
Вид сзади (скачать)
РЕКОМЕНДОВАННЫЙ ОБРАЗЕЦ ЗАПОЛНЕНИЯ СХЕМЫ АВТОПОЕЗДА (для сельскохозяйственной техники)
Вид сбоку
Вид сзади
Схема подключения знаков автопоезда, фары освещения сцепки МАЗ-5440.
Схема подключения знаков автопоезда, фары освещения сцепки МАЗ-5440.
Схема подключения знаков автопоезда, фары освещения сцепки МАЗ-5440.
Поделиться ссылкой:
Похожие статьи
- Схема АБС МАЗ 5340M4, 5550M4, 6312М4 (Mercedes, Евро-6).
- Схема подключения подогревателя Webasto DBW МАЗ-544018, 643018, 650118 (Евро-3), МАЗ-534019, 544019, 630119, 650119 (Евро-4) с двигателями Mercedes OM501LAIII/18, OM501LAIV/4.
- Электрооборудование АБС тормозов МАЗ-544018, 643018, 650118 (Евро-3), МАЗ-534019, 544019, 630119, 650119 (Евро-4) с двигателями Mercedes OM501LAIII/18, OM501LAIV/4.
- Плафоны освещения МАЗ-544018, 643018, 650118 (Евро-3), МАЗ-534019, 544019, 630119, 650119 (Евро-4) с двигателями Mercedes OM501LAIII/18, OM501LAIV/4.
- Сигнал автопоезда МАЗ-544018, 643018, 650118 (Евро-3), МАЗ-534019, 544019, 630119, 650119 (Евро-4) с двигателями Mercedes OM501LAIII/18, OM501LAIV/4.
- Система передних противотуманных фар МАЗ-544018, 643018, 650118 (Евро-3), МАЗ-534019, 544019, 630119, 650119 (Евро-4) с двигателями Mercedes OM501LAIII/18, OM501LAIV/4.
- Фара освещения сцепки, блокировка поворотной оси полуприцепа и бытовые приборы МАЗ-544018, 643018, 650118 (Евро-3), МАЗ-534019, 544019, 630119, 650119 (Евро-4) с двигателями Mercedes OM501LAIII/18, OM501LAIV/4.
- Система электропитания МАЗ-544018, 643018, 650118 (Евро-3), МАЗ-534019, 544019, 630119, 650119 (Евро-4) с двигателями Mercedes OM501LAIII/18, OM501LAIV/4.
- Система сигнализации поворотов и аварийной МАЗ-544018, 643018, 650118 (Евро-3), МАЗ-534019, 544019, 630119, 650119 (Евро-4) с двигателями Mercedes OM501LAIII/18, OM501LAIV/4.
- Расположение элементов блока коммутации БКА-3 МАЗ-544018, 643018, 650118 (Евро-3), МАЗ-534019, 544019, 630119, 650119 (Евро-4) с двигателями Mercedes OM501LAIII/18, OM501LAIV/4.
- Схема электрическая принципиальная БКА-3 МАЗ-544018, 643018, 650118 (Евро-3), МАЗ-534019, 544019, 630119, 650119 (Евро-4) с двигателями Mercedes OM501LAIII/18, OM501LAIV/4.
- Расположение контактов в разъемах МАЗ-544018, 643018, 650118 (Евро-3), МАЗ-534019, 544019, 630119, 650119 (Евро-4) с двигателями Mercedes OM501LAIII/18, OM501LAIV/4.
- Схема EDC МАЗ 5340M4, 5550M4, 6312М4 (Mercedes, Евро-6).
- Схема электрическая принципиальная пневмоподвески МАЗ 5340M4, 5550M4, 6312М4 (Mercedes, Евро-6).
- Блокировка межколесных и межосевого дифференциалов МАЗ-544018, 643018, 650118 (Евро-3), МАЗ-534019, 544019, 630119, 650119 (Евро-4) с двигателями Mercedes OM501LAIII/18, OM501LAIV/4.
Схема перевозки труб | «УралСпецТранс»
СХЕМА УКЛАДКИ МАКСИМАЛЬНОГО КОЛИЧЕСТВА ТРУБ ПРИ ОПРЕДЕЛЕННОМ ПОЛОЖЕНИИ СТОЕК
Трубовозный тягач и прицеп-роспуск предназначены для перевозки в составе автопоезда труб диаметром от 530 до 1420 мм, длиной 12 метров по всем видам дорог, а также плетей (секций труб) того же диаметра длиной до 36 метров вне дорог общей сети вдоль трассы строительства трубопровода.
При движении груженого автопоезда по дорогам общей сети с превышением габаритной ширины 2,5 метра маршрут движения должен быть согласован с ГИБДД МВД России в установленном порядке.
Схема укладки максимального количества труб при высоте коника 480 мм.
Схема укладки максимального количества труб при высоте коника 1200 мм.
Схема транспортировки труб автопоездом.
Трубовозные и плетевозные автопоезда состоят из тягача и прицепа-роспуска. Тягач оборудуется надрамником с отбойным щитом и поворотным коником с двумя переставными стойками-упорами. Прицеп-роспуск имеет двухосную подвеску и два неповоротных коника. Стойки-упоры коников тягача и роспуска переставляют в зависимости от количества и диаметра транспортируемых труб (плетей) и фиксируются в нужном положении шкворнями. Рама роспуска оборудована дышлом для соединения с буксирным устройством автомобиля при холостом пробеге и для крепления страховочного каната при транспортировке труб и плетей. При многорядной укладке трубы увязывают на кониках предохранительным канатом. Для удержания труб от сползания вперед или назад при рывках и резких торможениях тягача концы труб могут дополнительно фиксироваться к коникам. Трубоплетевозный автопоезд дополнительно может быть укомплектован чекерами трелевочными.
«Осевая нагрузка для грузовиков — один из важнейших факторов безопасности дорожного движения»
Тарас Коваль: «Осевая нагрузка для грузовиков — один из важнейших факторов безопасности дорожного движения»
Адрес материала: http://bamap.org/information/smi/2018_12_27_95940/
Время распечатки: 09.06.2022 11:14:52
Источник информации: Портал Грузовики и дороги
Эксперт МОЭС и топ-менеджер компании «Траско» Тарас Коваль продолжает делиться с читателями ГиД своими размышлениями о проблемах несоблюдения весового контроля на автодорогах России и игнорирования правил крепления грузов на автотранспорте. А также аргументирует необходимость корректив в законодательстве.
— Тарас, ваше выступление на октябрьских слушаниях по АСВГК в Общественной палате отличалось от других предложений. Ранее вы уже заявили о необходимости совершенствования законодательства в данной области. В чем особенность нынешнего предложения?
— Компания «Траско» уделяет повышенное внимание вопросам безопасности дорожного движения (БДД) и крепления грузов. Работая над методичкой «Рекомендации компании «Траско» по креплению грузов», особенно остро ощущаешь значимость правильного размещения грузов для соблюдения осевых параметров и безопасного движения автопоезда при любых погодных условиях по дорогам разного качества. Модуль из рекомендаций — «План погрузки» вошел в доклады, с которыми я выступил на нескольких мероприятиях осенью 2018 года.
— Эти доклады были посвящены теме АСВГК?
— Не совсем так. АСВГК — инструмент цифровой эпохи. Системные ошибки в алгоритме технологий «аналогового» периода не позволят создать дееспособный инструмент «в цифре». В аналоговой системе, используя возможности человеческого фактора, можно договориться. «Цифра» понимает лишь коды «1» или «0». Любое отличие от этого принципа приводит к сбоям в работе системы, иногда серьезным.
— Насколько проблематичным для компании «Траско» является внедрение АСВГК на автодорогах страны?
– Для «Траско» главной задачей в любых вопросах взаимодействия с рынком и властью является возможность — точнее, простота — соблюдения правил (в данном случае весогабаритных) и их единообразное применение ко всем участникам рынка. Контроль — один из основных инструментов выполнения этой задачи.
Для международного перевозчика прохождение весогабаритного контроля на пропускном пункте — ежедневная рутинная работа. Поэтому мы смотрим на АСВГК несколько под иным углом зрения, чем наши внутренние перевозчики. Проблемы проще диагностировать и решить в начальной стадии болезни, чем лечить затем последствия хирургическим вмешательством.
— Что выявила «диагностика»?
— В статье о многозвенных автопоездах я уже высказывал мысль про изначально нелогичный подход в России при постановке приоритетов для автотранспорта в целом и грузового автотранспорта в частности. Проблема тормозит развитие автотранспорта, поэтому повторюсь здесь.
Абсолютное большинство ведущих мировых автотранспортных держав в деятельности грузового автотранспорта располагают приоритеты в следующем порядке: 1) экология, 2) безопасность дорожного движения, 3) сохранность дорог, 4) эффективность логистики и, соответственно, экономики перевозок.
Такая расстановка приоритетов развития автотранспорта логична и имеет мотивацию.
При этом в личном общении я часто слышу от коллег: «Спустись с небес на землю. Где Россия — и где экология! Давай ее хотя бы на 3-е – 4-е место в списке приоритетов поставим!» Мне сложно представить, какие иные доводы привели бы к созданию Европейской модульной системы (EMS) от шведских коллег или стали мотивацией к омоложению автопарка через «экологическую» тарификацию оплаты автобанов в Германии.
Да, российские реалии несколько отличаются. Одним из главных факторов безопасного движения автопоезда является минимальная нагрузка на ведущую ось тягача в размере не менее 25% от полной массы ТС. От ассоциации мы неофициально обратились в соответствующую структуру с просьбой подтвердить необходимость такого ограничения для обеспечения БДД в России. «Надо посоветоваться с дорожниками» — пожалуй, лучший ответ на вопрос о приоритетах в России.
Однако на этом история не закончилась. В Техническом регламенте о безопасности колесных транспортных средств РФ от 2010 года такое требование было. В действующем техрегламенте Таможенного союза 2011 года оно пропало.
Аналогичная ситуация и с постановлением Правительства № 272 от 15.04.2011 «Правила перевозки грузов автомобильным транспортом» со всеми многочисленными исправлениями и дополнениями. Штрафные санкции выносятся за нарушение 272-го постановления, поэтому для перевозчика интересен в первую очередь этот документ. В то время как в Германии или Швеции весогабаритные параметры регламентируются единым документом — как по конструкции ТС, так и по нагрузкам на дорожное полотно.
– На схемах, которые вы демонстрировали при докладах, тема БДД в зависимости от размещения груза и осевой нагрузки будет восприниматься проще. Предлагаю перейти к ним.
– Договорились.
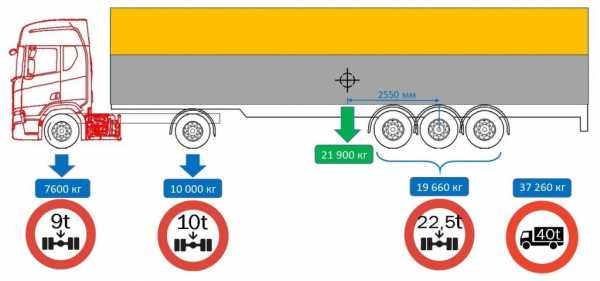
(схема 1)
Схема 1. На ней представлен классический европейский пятиосный автопоезд. При равномерной загрузке без нарушения российских осевых параметров мы можем перевезти 21,9 т груза. При этом полная масса автопоезда составляет всего 37,26 т. Запас по полной массе составляет 2,74 т. При увеличении загрузки на ведущей оси тягача образуется перегруз.
Одна из самых сложных и показательных ситуаций возникает при перевозке грузов длиной 12 м, которые часто встречаются в строительной, машиностроительной и ряде других отраслей.
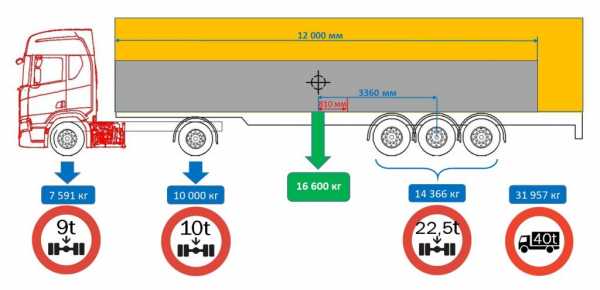
(схема 2)
Без превышения нагрузок по осям и упором в переднюю стенку мы можем загрузить только 16,6 т (схема 2). Для погрузки «стандартных» для России 20 т груз необходимо сдвигать назад (схема 3).
(схема 3)
Самые опасные последствия плохого крепления груза в результате применения экстренного торможения или ДТП возникают при наличии зазора у передней стенки!
Кроме того, смещение груза назад приводит к недостаточной нагрузке на ведущую ось тягача и уменьшению ее сцепных свойств с дорожным покрытием. Увеличивается вероятность «складывания» автопоезда (слайд 5).
– Но груз ведь можно закрепить…
– Вы абсолютно правы. Например, изготовить деревянную стенку . Только на практике в России возникают следующие нюансы.
1. В нашей стране очень низкая, близкая к нулю, культура крепления грузов. Обусловлено это фактическим отсутствием требований и контроля, а также надеждой на «авось» и «здесь недалеко». К сожалению, не всегда доезжает.
2. Часто нашим водителям не удается найти в месте погрузки достаточно брусков и досок, чтобы самостоятельно смонтировать стенку или панель для блокировки груза.
3. В Европе необходимость смещения груза и монтажа дополнительного крепления возникает при более высокой по весу или сложности погрузке.
4. Отсутствует система обмена палет и их использования для крепления грузов.
Поэтому тенденция аварий со страшными последствиями не случайна. В статистике ДТП от ГИБДД сложно найти в качестве причин указание неправильного или даже полного отсутствия крепления груза. Обычно указываются лишь последствия: неправильный выбор скоростного режима и иные условия.
– Продолжая тему перевозки груза длиной 12 м, давайте сравним возможности легальной загрузки в России и, например, в Германии. А также различие в воздействии автопоезда на дорогу.
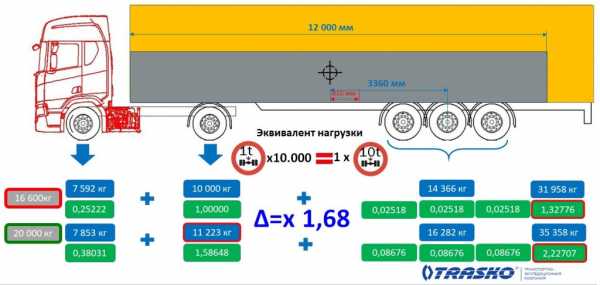
– Смотрим схему 4. Для оценки воздействия автопоезда на дорогу воспользуемся формулой, которую применяют в Европе и США и которая легла в техническое обоснование введения системы «Платон». Речь идет о принципе «четвертой степени» или современной его трактовке: «влияние на дорогу от проезда одной оси с нагрузкой в 10 т эквивалентно последствиям проезда 10 тыс. осей с нагрузкой в 1 т».
(схема 4)
На практике при расчете берут отношение нагрузки каждой оси к 10 т, возводят в четвертую степень и складывают показатели всех осей. Полученная сумма — «эквивалент 10-тонной нагрузки» автомобиля или автопоезда — является основным фактором воздействия ТС на дорогу. Как видно из приведенной схемы, при полезной нагрузке, большей на 3,4 т (на 20,5%), разница в воздействии на дорогу увеличивается всего в 1,68 раза.
– Дорожники говорят о разнице в воздействии легкового и грузового автомобиля в 60000–160000 раз. На первое восприятие, 1,68 раза — совсем небольшая плата за безопасность. Я правильно понимаю вашу логику?
– Да, правильно. По дорогам передвигаются грузовые автомобили и автопоезда с разной полной массой и разных конфигураций. Даже при одинаковой полной массе автопоезда и соблюдении осевых ограничений воздействие на дорогу при расчете через «эквивалент 10-тонной нагрузки» может отличаться в три раза. А между полностью и частично груженым автопоездом (полная масса 30 т) — в восемь раз (схема 5).
(схема 5)
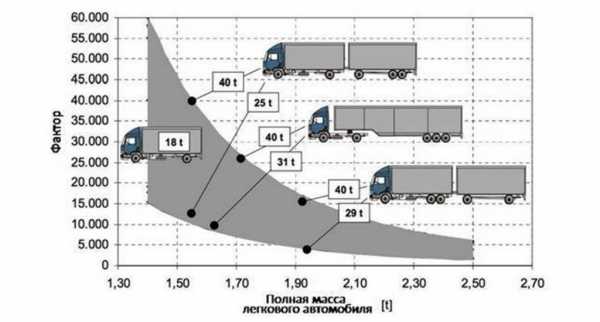
Корректный расчет воздействия на дорогу возможен при наличии статистики конструкции автомобилей и автопоездов (схема 6) и распределения их полной массы (схема 7). Данные по Германии представлены выше. В России мне такие данные не попадались.
(схема 6)
(схема 7)
– Существует ли диаграмма, наглядно демонстрирующая отличия осевых ограничений в России и Германии с точки зрения безопасности размещения грузов?
– Пожалуй, отличия в плане погрузки с соблюдением российских и европейских осевых ограничений — одна из самых ценных глав рекомендаций «Траско» по креплению груза.
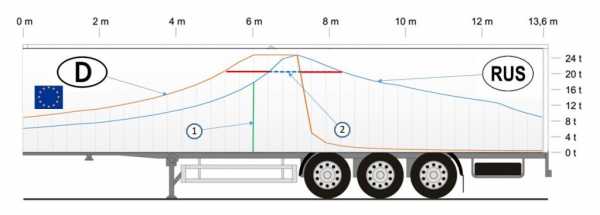
На схеме 8 представлены отличия размещения груза для стандартного европейского пятиосного автопоезда в составе тягача с колесной формулой 4х2 и трехосного полуприцепа с внутренней длиной 13,6 м. Голубая линия — допустимая максимальная загрузка с соблюдением осевых ограничений в России в зависимости от расположения центра тяжести. Оранжевая линия — то же самое для Германии. Рассматривая два графика, отчетливо видим, что «российский» смещен назад, поэтому и груз приходится смещать назад.
(схема 8. Центр тяжести груза должен располагаться во внутренней части диаграммы:
1. Полезная нагрузка при расположении центра тяжести груза на расстоянии 6 м от передней стенки. 2. Интервал расположения центра тяжести для легальной погрузки груза весом 20 т.) http://truckandroad.ru/politics/taras-koval-osevaja-nagruzka-dlja-gruzovikov-odin-iz-vazhnejshih-faktorov-bezopasnosti-dorozhnogo-dvizhenija.html
При установке равномерного груза длиной 12 м вплотную к передней стенке центр тяжести располагается на расстоянии 6 м (вертикальная зеленая линия). Как видно из схемы, для соблюдения российских осевых параметров при таком, самом безопасном расположении груза мы можем загрузить всего 16,6 т. По европейским же правилам с таким расположением центра тяжести мы можем загрузить автопоезд почти до полной массы 40 т с полезной нагрузкой 24,4 т.
Ранее мы говорили об отсутствии в России требования о минимальной нагрузке ведущей оси тягача в размере 25%. Диаграмма графически показывает это отличие законодательства. В России фактически допускается ситуация отрыва ведущих колес тягача от дороги при соблюдении всех остальных весовых параметров. К сожалению, такова реальность приоритета сохранности дорог перед безопасностью.
– А если использовать шестиосный автопоезд еще и с полной массой 44 т?
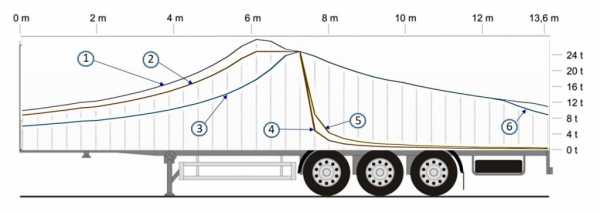
– В наших рекомендациях присутствует сравнение схемы нагрузки при использовании пятиосного и шестиосного автопоезда с соблюдением российских и европейских нормативов (схема 9).
(схема 9:
– шестиосный автопоезд полной массой 44 т с технической нагрузкой на сцепной шкворень полуприцепа 12 т;
– пятиосный автопоезд полной массой 40 т с допустимой нагрузкой на ведущую ось тягача 11,5 т;
– пятиосный автопоезд полной массой 40 т с допустимой нагрузкой на ведущую ось тягача 10 т;
– ограничение минимальной нагрузки ведущей оси двухосного тягача в размере 25% от полной массы;
– ограничение минимальной нагрузки ведущих осей трехосного тягача в размере 25% от полной массы;
– линия отрыва ведущей оси тягача.)
Казалось бы, при расположении центра тяжести в первой половине полуприцепа преимущества по БДД, минимальному воздействию на дорожное полотно и по эффективности логистики налицо. Однако опыт других стран говорит, что введение норматива полной массы 44 т для шестиосных автопоездов не так просто и однозначно.
В России ситуация еще сложнее. При 44 т допустимой полной массы осевые нагрузки остаются неизменными.
Логично использование шестиосных автопоездов полной массой 44 т для перевозки ISO — контейнеров 40’ и 45’. В отдельных странах применяется для лесовозов, молоковозов и зерновозов. В любом случае 44 т достигает за счет увеличения допустимой осевой нагрузки на прицеп или полуприцеп при сохранении ограничения полной массы на каждый модуль автопоезда. Например, для трехосных контейнерных полуприцепов нагрузка на прицепную тележку возрастает с 24 до 27 т. Физически вместо двух межосевых расстояний 1310 + 1310 мм появляется 1310 + 1410 мм.
Проблематика полной массы автопоезда 44 т:
1. Для работы с трехосным тягачом с повышенной нагрузкой на седельно-сцепное устройство необходимы полуприцепы с усиленной узкой передней частью рамы. Такая комплектация дороже, поэтому не так часто встречается на рынке. Если использовать стандартный полуприцеп, предназначенный для двухосного тягача, то он прогибается и рама в передней части может сломаться;
2. При сцепке трехосного седельного тягача с полуприцепом, рассчитанным для работы с двухосным тягачом, чтобы при поворотах не задевать задней частью тягача полуприцеп, приходится сдвигать седельно-сцепное устройство назад на 300–350 мм.
Это приводит к перераспределению осевых нагрузок на седельном тягаче. Уменьшается нагрузка на рулевую ось, что отрицательно сказывается на управляемости автопоезда, особенно в непогоду. Машина упрямо едет по прямой.
3. Контролировать характеристики полуприцепа для трехосного тягача сложнее.
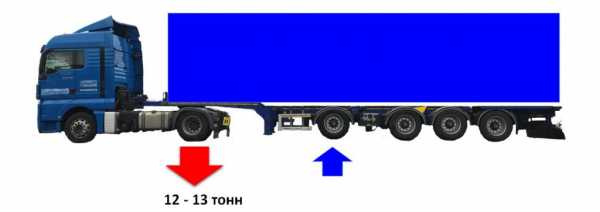
4. Современные возможности подъемных осей на тягаче и полуприцепе позволяют существенно и быстро изменять распределение осевых нагрузок при движении автомобиля и при прохождении статического или динамического весового контроля. Один из примеров — использование двухосного седельного тягача и четырехосного полуприцепа (схема 10). При подъеме первой оси полуприцепа нагрузка на ведущую ось тягача может достигать 12–13 т.
(схема 10)
В европейских странах ответственность за алгоритм автоматической работы подъемных осей возложена на производителей подвижного состава. Как избежать данной ситуации при помощи АСВГК без отрегулированных правил в России?
5. Увеличение полной массы автопоездов приводит к перемещению грузопотока с ж/д и речного транспорта на автомобильный, поэтому многие страны по-прежнему придерживаются лимитирования полной массы автопоезда в 40 т для большинства перевозок.
– Какое решение проблемы вы предлагаете?
– Решение может быть во ведении в России весовых норм, прописанных в Директиве ЕС 96/53 — в вариации Германии или Австрии: для всех типов дорог, по которым разрешено движение грузового транспорта и переход для части грузов и стратегических направлений на работу по схеме Европейской модульной системы (EMS). Пока этого не произойдет, тема обсуждения принципа работы АСВГК будет горячей.
Дизайн и программирование:Abiatec
77-30569/330258 Результаты численного моделирования прямолинейного движения двухзвенного колесного транспортного комплекса по деформируемому грунту
77-30569/330258 Результаты численного моделирования прямолинейного движения двухзвенного колесного транспортного комплекса по деформируемому грунту
автор: профессор, д.т.н. Горелов В. А.
УДК 629.33
МГТУ им. Н.Э. Баумана
Введение
Неоспорим тот факт, что в автомобилестроении большие перспективы развития имеет направление, связанное с применением многоосных большегрузных автопоездов и сочленённых самоходных платформ. Широкое распространение и дальнейшее совершенствование указанных транспортных средств обусловлено рядом объективных факторов: потребностью в перевозках тяжёлых крупногабаритных грузов с исключением процессов раздельной перевозки и последующей сборки составных частей; необходимостью повышения грузоподъёмности при одновременном обеспечении высокой проходимости при движении по грунтовым дорогам и вне дорог; необходимостью обеспечения малых давлений на опорную поверхность в целях уменьшения разрушающего воздействия на почву и др.
Большие перспективы имеет использование автопоездов в промышленных и сельскохозяйственных районах со слаборазвитой сетью дорог, что особенно актуально для нашей страны. Однако известно, что прицепная нагрузка на крюке существенно ухудшает проходимость. Тягово-сцепные свойства автопоездов значительно ниже, чем одиночных автомобилей.
1. Способы повышения тягово-динамических свойств автопоездов
Для повышения тягово-динамических свойств предлагаются различные конструктивные решения. Стремление к повышению проходимости автопоездов привело к созданию так называемых активных автопоездов. Проходимость активных автопоездов значительно выше, чем одиночных автомобилей, что объясняется большей суммарной тягой (из-за большего числа ведущих колес) в тяжелых дорожных условиях. Активные автопоезда с успехом эксплуатируются в тяжелых дорожных условиях, их использование позволяет транспортировать грузы, когда это не возможно за счет обычных полноприводных автомобилей.
Ниже приводится изложение одного из возможных способов повышения проходимости прицепного автопоезда за счет раздельного перемещения звеньев. Этот способ применим не только к автопоездам, в составе которых используются полноприводные тягачи, но и к автопоездам с неполноприводными тягачами. По данным [1] в последнем случае эффект повышения проходимости даже больше, чем в первом.
Сущность способа заключается в следующем (рис. 1).
При потере автопоездом проходимости, когда сила сопротивления качению автопоезда , равная сумме сил сопротивления качению тягача и прицепа , оказывается больше силы тяги по сцеплению с грунтом ведущих колес тягача , затормаживается заднее звено автопоезда - прицеп и от него отталкивается переднее звено - тягач, осуществляемое двусторонним силовым гидроцилиндром, расположенным в раздвижном телескопическом дышле прицепа. При этом к силе тяги ведущих колес тягача добавляется сила отталкивания . Тягач, двигаясь раздельно от прицепа, может преодолевать сопротивление качению . По окончании перемещения тягач тормозится, производится растормаживание прицепа, который подтягивается тем же силовым гидроцилиндром к тягачу силой . При этом прицеп, двигаясь раздельно, может преодолевать сопротивление качению . Для продолжения движения автопоезда циклы раздельного перемещения тягача и прицепа повторяются [1].
Рис. 1. Принципиальная схема движения автопоезда при раздельном перемещении его звеньев
Способ раздельного перемещения звеньев обеспечивает также возможность преодоления более крутых подъемов. Движение автопоезда при раздельном перемещении звеньев может осуществляться или с подводом мощности к ведущим осям тягача или только за счет сил отталкивания и подтягивания . В последнем случае преодолеваемое тягачом сопротивление качению снижается, но увеличение массы прицепа может частично компенсировать это снижение.
Рассмотренный способ повышения проходимости, основанный на раздельном перемещении звеньев, может быть применен не только на автопоездах, но и на транспортных средствах других типов. Экономически целесообразно его использование на транспортных средствах с гидросистемами на самосвальных автопоездах, на тракторных поездах, на сочлененных колесных автомобилях.
При соединении двух элементарных кинематических звеньев (одно из которых или оба звена активные) в точке сцепки возникают силы взаимодействия, являющиеся реакциями связи, величина и направление действия которых зависят от типа связи (тяговая или опорно-тяговая), вида сопряженных звеньев (активное или пассивное звено), порядка их сопряжения (переднее звено активное, оба звена активных и т.д.) и режима движения.
Интенсивность продольных горизонтальных колебаний зависит от характера внешних сил, воздействующих на ТС при его движении, качества дорожного покрытия, некоторых конструктивных и эксплуатационных параметров (жесткости упругой связи, зазоров и сопротивления демпфера в сцепке, соотношения масс звеньев) и квалификации водителя [2, 3, 4].
Характер динамического взаимодействия звеньев автопоезда существенно зависит от характеристики упругого элемента и упругой характеристики сцепного устройства. На упругую характеристику сцепного устройства влияет наряду с характеристикой упругого элемента характер монтажа (наличие предварительного поджатия и его величина) и наличие зазоров [2, 4].
Расчеты показывают, что тягач с упругим устройством в сцепке теоретически способен сдвинуть прицепное звено в два раза большее по массе по сравнению с тягачем, имеющим жесткое сцепное устройство. Выявлено также, что упругая связь по сравнению с жесткой сцепкой может обеспечить трогание автопоезда с места при меньшем коэффициенте сцепления колес с опорной поверхностью [2].
2. Метод прогнозирования опорной проходимости колесных транспортных комплексов
Таким образом, в ходе экспериментальных исследований доказано, что в зависимости от характера связи между тягачом и прицепом автопоезд может иметь различные тягово-динамические качества. В этой связи необходимо на стадии проектирования решить задачу по прогнозированию характеристик прямолинейного движения автопоезда по бездорожью при: буксировании прицепа движущимся тягачом с жесткой связью, буксировании прицепа движущимся тягачом с гибкой связью (односторонней на тросе), буксировании прицепа неподвижным тягачом с использованием лебёдки и анкерно-упорного устройства.
Для этих целей были разработана математическая модель прямолинейного движения колесного транспортного комплекса по деформируемому грунту, расчетная схема которой представлена на рис. 2. Особенности математической модели динамики автопоезда, а также метода моделирования свойств опорного основания, подробно представлены в [5, 6].
Рис. 2. Расчетная схема движения автопоезда
Построение математической модели прямолинейного движения колесного комплекса рассмотрено на примере трехосного тягача с возможностью реализации индивидуального, дифференциального и блокированного привода колёс и трехоcного прицепа в ведомом режиме. Расчётная схема автопоезда, представленная на рис. 2, принята с учётом характера решаемой задачи и описывается следующими уравнениями движения для тягача (1) и прицепа (2):
тягач
прицеп
Здесь i= 1, …3; и - масса тягача и прицепа, соответственно; - масса колеса; - момент инерции колеса; i - номер колеса; и - продольное ускорение центра масс тягача и прицепа, соответственно; - угловое ускорение i-го колеса; - продольное ускорение центра масс i-го колеса; g - ускорение свободного падения; - угол наклона опорной поверхности; - коэффициент буксования; - тягово-энергетическая характеристика; - тягово-сцепная характеристика; - вертикальная реакция в пятне контакта колес тягача с опорной поверхностью; - радиус колеса в свободном режиме качения; - сила на крюке; - сила, действующая на корпус тягача со стороны колеса по оси X.
3. Результаты вычислительных экспериментов
Ниже представлен анализ результатов математического моделирования, полученных в ходе теоретических исследований автопоезда на основе разработанного метода прогнозирования опорной проходимости автопоездов при прямолинейном движении по бездорожью
На этапе моделирования были исследованы следующие случаи движения: в качестве тестового режима для расчетов выбран вариант с тремя различными жесткостями сцепного устройства для анализа работоспособности математической модели.
Исходные данные для проведения теоретических исследований следующие: масса автомобиля mс = 13800 кг; масса прицепа mс_пр = 8400 кг; радиус колеса в свободном режиме rk0 = 0.5 м; максимальное значение коэффициента сцепления колеса с опорной поверхностью в продольном направлении φmax = 0.35; схема трансмиссии автомобиля-тягача блокированная.
Процесс моделирования начинался со скорости Vx0 =0.1 м/с и для автомобиля-тягача, и для прицепа. Движение в сложных дорожных условиях не предполагает высоких скоростей, поэтому максимальная скорость по условию развиваемого момента двигателем задавалась равной Vmax = 2 м/с.
На первоначальном этапе проведения расчетов была поставлена задача моделирования движения автопоезда с характеристиками сцепного устройства в «граничных» условиях, т.е. при отсутствии связи (Pкр = 0) и при жесткой связи, т.е. при больших значениях коэффициента жесткости сцепного устройства в продольном направлении и коэффициента сопротивления демпфера сцепного устройства в продольном направлении .
При отсутствии силы, связывающей тягач и прицеп, были получены результаты, представленные на рис 3-5.
Рис. 3. Скорость центра масс автомобиля-тягача
Рис. 4. Скорость центра масс прицепа
Рис. 5. Угловая скорость вращения колес автомобиля-тягача
Анализ представленных результатов позволяет сделать вывод о том, что автомобиль-тягач и прицеп двигались отдельно друг от друга. Автомобиль-тягач плавно разгонялся до заданной скорости (рис. 3), а прицеп остановился через 0,07 с после начала движения (рис. 4), небольшая скорость обусловлена заданием ограничений при реализации математической модели с целью исключения нулевых значений.
Рис. 5 иллюстрирует равенство угловых скоростей колес автомобиля тягача, что характерно для блокированного привода.
На следующем этапе проведения расчетов была исследована динамика автопоезда при заранее заданном очень большом значении коэффициента жесткости сцепного устройства С=107 Н/м и отсутствии демпфирования.
При выбранном значении коэффициента жесткости сцепного устройства тягач смог транспортировать за собой прицеп (рис. 6, 7), при этом пройденный колесами путь с учетом начальных координат представлен на рис. 9. Характер изменения силы тяги на крюке, представленный на рис. 8, свидетельствует о колебательном процессе, а также о резком нарастании силы в сцепном устройстве, что в итоге может нарушить работоспособность конструкции.
Таким образом, на основе разработанной математической модели возможно оценивать также динамические нагрузки на сцепные устройства с целью оптимизации конструктивных решений буксировочных устройств по критериям прочности и надежности. Результаты движения автопоезда при различном характере связи между звеньями подтверждают необходимость оптимизации параметров сцепного устройства.
Рис. 6. Скорость центра масс автомобиля-тягача
Рис. 7. Скорость центра масс прицепа
Рис. 8. Характер изменения силы тяги на крюке
Рис. 9. Перемещение колес автомобиля-тягача
Проведенная оптимизация по методу половинного деления позволила сделать вывод, что для заданных условий необходимо принять коэффициент жесткости сцепного устройства в продольном направлении =106 Н/м и соответствующий ему коэффициент сопротивления демпфера сцепного устройства в продольном направлении = 20000 Н×с/м. Результаты динамики автопоезда представлены на рис 10-12. Характер изменения показателей движения свидетельствует о необходимости демпфирования в сцепном устройстве. К 3-ой секунде после начала движение стало установившимся.
Рис. 10. Скорость центра масс автомобиля-тягача
Рис. 11. Скорость центра масс прицепа
Рис. 12. Характер изменения силы тяги на крюке
Отдельной интересной задачей является исследование раздельного перемещения звеньев. Исследуем динамику прицепа при различном характере приложения крюковой нагрузки. При заданном максимальном значении возможной тяги Pкр_max , изменялось время нарастания её действия. В данном случае действие Pкр_max имитирует работу вспомогательных устройств, например лебедки.
Исходные данные для проведения теоретических исследований следующие: масса звена mс_пр = 8400 кг; радиус колеса в свободном режиме rk0 = 0.5 м; максимальное значение коэффициента сцепления колеса с опорной поверхностью в продольном направлении φmax = 0.35.
Процесс моделирования начинался со скорости Vx0 =0.1 м/с. При достаточно большой скорости нарастания (рис. 13) Pкр_max до значения в 30000 Н были получены результаты, представленные на рис. 14 и 15. Их анализ показывает, что смоделирован случай резкого нарастания силы сопротивления грунта и звено перемещается юзом.
Рис. 13. Характер изменения силы тяги на крюке
Рис. 14. Скорость центра масс
Рис. 15. Угловая скорость вращения колес
Безусловно, такой характер приложения нагрузки на крюке не может положительно сказаться на обеспечении высокого уровня проходимости, поэтому в следующем расчетном случае нагрузка на крюке увеличивалась медленнее (рис. 16.), чем в первом случае. Анализ графиков рис. 17 и 18 показывает, что в таком случае скорость центра масс звена находится в соответствии со скоростью вращения колес, т.е. плавное приложение силы тяги на крюке позволяет двигаться без юза. В то время, пока силы на крюке было не достаточно для движения, прицеп останавливался, и в период с 0,2 по 0,6 секунду практически оставался в состоянии покоя.
Рис. 16. Характер изменения силы тяги на крюке
Рис. 17. Скорость центра масс
Рис. 18. Угловая скорость вращения колес
Заключение
Проведённые вычислительные эксперименты прямолинейного движения автопоезда полной массой 22 т как при совместном перемещении звеньев, так и при раздельном, позволили сделать выводы о работоспособности модели и пригодности её для прогнозирования опорной проходимости двухзвенного автопоезда, в том числе и при различном характере и параметрах связи между звеньями, а также для подбора оптимальных параметров для сцепных устройств.
Полученные результаты исследований совместной динамики звеньев автопоезда при различных параметрах сцепного устройства подтвердили противоречивость предъявляемых к ним требований:
- на этапе разгона сила на крюке не должна быть достаточно большой, чтобы тягач имел возможность запасти кинетическую энергию и использовать её для «страгивания» прицепа с места, а также с целью исключения перемещения прицепа юзом;
- по мере увеличения скорости автопоезда сила в сцепном устройстве должна возрастать, чтобы исключить колебания, негативным образом сказывающиеся на динамике системы в целом;
- характер приложения нагрузки на крюке должен быть плавным, резкое приложение силы отрицательным образом сказывается на опорной проходимости автопоезда.
Очевидно, что для обеспечения наилучших тягово-динамических качеств автопоездов необходимо осуществлять управление характеристиками сцепных устройств непрерывно в процессе движения. Например, в качестве варианта «на перспективу» возможно предложить использование демпфирующих устройств на основе магнитореологических жидкостей. Такие устройства позволят непрерывно изменять характеристики сцепного устройства в процессе движения в зависимости от внешних условий.
Таким образом, представленные результаты исследований позволили сделать вывод об эффективности разработанного метода прогнозирования опорной проходимости колесных транспортных комплексов при прямолинейном движении по бездорожью, который может быть использован разработчиками на стадии проектирования колесной техники для решения широкого круга задач, в том числе, для оценки средней скорости движения на заданном маршруте, принципиальной возможности перевозки конкретного груза в заданных дорожных условиях, для анализа преимуществ и недостатков различных схем трансмиссии, для оценки эффективности различных законов управления индивидуальным приводом колесной машины, для проектирования и расчета буксирных устройств и т.д.
СПИСОК ЛИТЕРАТУРЫ
1. Платонов В.Ф. Полноприводные автомобили. – М.: Машиностроение, 1981. – 279 с.
2. Гладов Г.И., Петренко А.М. Специальные транспортные средства: Теория: Учебник для вузов / Под ред. Г.И. Гладова. – М.: ИКЦ «Академкнига», 2006. – 215 с.
3. Гладов Г.И., Петренко А.М. Специальные транспортные средства: Проектирование и конструкции: Учебник для вузов / Под ред. Г.И. Гладова. – М.: ИКЦ «Академкнига», 2004. – 320 с.
4. Закин Я.Х. Прикладная теория движения автопоезда. – Изд-во «Транспорт», 1967. – 253 с.
5. Котиев Г.О., Горелов В.А. Моделирование прямолинейного движения полноприводной колёсной машины по несвязным грунтам // Труды НАМИ. Автомобили и двигатели. Сборник научных трудов. Выпуск 241. М., изд. ГНЦ РФ ФГУП «НАМИ». – 2009. – С.25-39.
6. Котиев Г.О., Горелов В.А., Жирный Р.И. Математическая модель прямолинейного движения автопоезда с жесткой и гибкой связью между звеньями // Труды НГТУ. – 2010 - №3. – С.138-144.
7. Серебренный И.В., Котиев Г.О. Повышение проходимости автомобиля за счёт рационального распределения потоков мощности по колёсам // Вестник МГТУ им. Н.Э. Баумана. Машиностроение. - 2008. - Специальный выпуск. - С.193-201.
Тарас Коваль: «Осевая нагрузка для грузовиков — один из важнейших факторов безопасности дорожного движения»
Эксперт МОЭС и топ-менеджер компании «Траско» Тарас Коваль продолжает делиться с читателями ГиД своими размышлениями о проблемах несоблюдения весового контроля на автодорогах России и игнорирования правил крепления грузов на автотранспорте. А также аргументирует необходимость корректив в законодательстве.
— Тарас, ваше выступление на октябрьских слушаниях по АСВГК в Общественной палате отличалось от других предложений. Ранее вы уже заявили о необходимости совершенствования законодательства в данной области. В чем особенность нынешнего предложения?
— Компания «Траско» уделяет повышенное внимание вопросам безопасности дорожного движения (БДД) и крепления грузов. Работая над методичкой «Рекомендации компании «Траско» по креплению грузов», особенно остро ощущаешь значимость правильного размещения грузов для соблюдения осевых параметров и безопасного движения автопоезда при любых погодных условиях по дорогам разного качества. Модуль из рекомендаций — «План погрузки» вошел в доклады, с которыми я выступил на нескольких мероприятиях осенью 2018 года.
— Эти доклады были посвящены теме АСВГК?
— Не совсем так. АСВГК — инструмент цифровой эпохи. Системные ошибки в алгоритме технологий «аналогового» периода не позволят создать дееспособный инструмент «в цифре». В аналоговой системе, используя возможности человеческого фактора, можно договориться. «Цифра» понимает лишь коды «1» или «0». Любое отличие от этого принципа приводит к сбоям в работе системы, иногда серьезным.

Тарас Коваль часто выступает с докладами по темам соблюдения требований крепления грузов и проблеме АСВГК (фото: ATO Events)
— Насколько проблематичным для компании «Траско» является внедрение АСВГК на автодорогах страны?
– Для «Траско» главной задачей в любых вопросах взаимодействия с рынком и властью является возможность — точнее, простота — соблюдения правил (в данном случае весогабаритных) и их единообразное применение ко всем участникам рынка. Контроль — один из основных инструментов выполнения этой задачи.
Для международного перевозчика прохождение весогабаритного контроля на пропускном пункте — ежедневная рутинная работа. Поэтому мы смотрим на АСВГК несколько под иным углом зрения, чем наши внутренние перевозчики. Проблемы проще диагностировать и решить в начальной стадии болезни, чем лечить затем последствия хирургическим вмешательством.
— Что выявила «диагностика»?
— В статье о многозвенных автопоездах я уже высказывал мысль про изначально нелогичный подход в России при постановке приоритетов для автотранспорта в целом и грузового автотранспорта в частности. Проблема тормозит развитие автотранспорта, поэтому повторюсь здесь.
Абсолютное большинство ведущих мировых автотранспортных держав в деятельности грузового автотранспорта располагают приоритеты в следующем порядке: 1) экология, 2) безопасность дорожного движения, 3) сохранность дорог, 4) эффективность логистики и, соответственно, экономики перевозок.
Такая расстановка приоритетов развития автотранспорта логична и имеет мотивацию.
При этом в личном общении я часто слышу от коллег: «Спустись с небес на землю. Где Россия — и где экология! Давай ее хотя бы на 3-е – 4-е место в списке приоритетов поставим!» Мне сложно представить, какие иные доводы привели бы к созданию Европейской модульной системы (EMS) от шведских коллег или стали мотивацией к омоложению автопарка через «экологическую» тарификацию оплаты автобанов в Германии.
Да, российские реалии несколько отличаются. Одним из главных факторов безопасного движения автопоезда является минимальная нагрузка на ведущую ось тягача в размере не менее 25% от полной массы ТС. От ассоциации мы неофициально обратились в соответствующую структуру с просьбой подтвердить необходимость такого ограничения для обеспечения БДД в России. «Надо посоветоваться с дорожниками» — пожалуй, лучший ответ на вопрос о приоритетах в России.
Однако на этом история не закончилась. В Техническом регламенте о безопасности колесных транспортных средств РФ от 2010 года такое требование было. В действующем техрегламенте Таможенного союза 2011 года оно пропало.
Аналогичная ситуация и с Постановлением Правительства № 272 от 15.04.2011 «Правила перевозки грузов автомобильным транспортом» со всеми многочисленными исправлениями и дополнениями. Штрафные санкции выносятся за нарушение 272-го постановления, поэтому для перевозчика интересен в первую очередь этот документ. В то время как в Германии или Швеции весогабаритные параметры регламентируются единым документом — как по конструкции ТС, так и по нагрузкам на дорожное полотно.
– На схемах, которые вы демонстрировали при докладах, тема БДД в зависимости от размещения груза и осевой нагрузки будет восприниматься проще. Предлагаю перейти к ним.
– Договорились.
(схема 1)
Схема 1. На ней представлен классический европейский пятиосный автопоезд. При равномерной загрузке без нарушения российских осевых параметров мы можем перевезти 21,9 т груза. При этом полная масса автопоезда составляет всего 37,26 т. Запас по полной массе составляет 2,74 т. При увеличении загрузки на ведущей оси тягача образуется перегруз.
Одна из самых сложных и показательных ситуаций возникает при перевозке грузов длиной 12 м, которые часто встречаются в строительной, машиностроительной и ряде других отраслей.
(схема 2)
Без превышения нагрузок по осям и упором в переднюю стенку мы можем загрузить только 16,6 т (схема 2). Для погрузки «стандартных» для России 20 т груз необходимо сдвигать назад (схема 3).
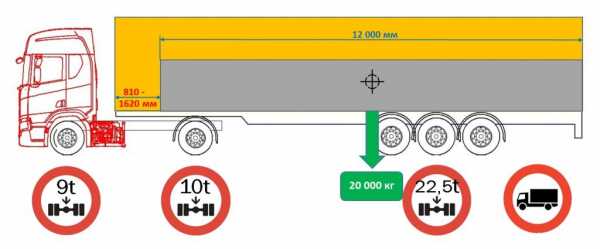
(схема 3)
Самые опасные последствия плохого крепления груза в результате применения экстренного торможения или ДТП возникают при наличии зазора у передней стенки! (слайд 4).

(схема 4)
Кроме того, смещение груза назад приводит к недостаточной нагрузке на ведущую ось тягача и уменьшению ее сцепных свойств с дорожным покрытием. Увеличивается вероятность «складывания» автопоезда (слайд 5).

(схема 5)
– Но груз ведь можно закрепить…
– Вы абсолютно правы. Например, изготовить деревянную стенку — как на фото 1 и 2. Только на практике в России возникают следующие нюансы.

(фото 1)

(фото 2)
- В нашей стране очень низкая, близкая к нулю, культура крепления грузов. Обусловлено это фактическим отсутствием требований и контроля, а также надеждой на «авось» и «здесь недалеко». К сожалению, не всегда доезжает (фото 3).
- Часто нашим водителям не удается найти в месте погрузки достаточно брусков и досок, чтобы самостоятельно смонтировать стенку или панель для блокировки груза.
- В Европе необходимость смещения груза и монтажа дополнительного крепления возникает при более высокой по весу или сложности погрузке.
- Отсутствует система обмена палет и их использования для крепления грузов.

(фото 3)
Поэтому тенденция аварий со страшными последствиями не случайна. В статистике ДТП от ГИБДД сложно найти в качестве причин указание неправильного или даже полного отсутствия крепления груза. Обычно указываются лишь последствия: неправильный выбор скоростного режима и иные условия.
– Продолжая тему перевозки груза длиной 12 м, давайте сравним возможности легальной загрузки в России и, например, в Германии. А также различие в воздействии автопоезда на дорогу.
– Смотрим схему 6. Для оценки воздействия автопоезда на дорогу воспользуемся формулой, которую применяют в Европе и США и которая легла в техническое обоснование введения системы «Платон». Речь идет о принципе «четвертой степени» или современной его трактовке: «влияние на дорогу от проезда одной оси с нагрузкой в 10 т эквивалентно последствиям проезда 10 тыс. осей с нагрузкой в 1 т».
(схема 6)
На практике при расчете берут отношение нагрузки каждой оси к 10 т, возводят в четвертую степень и складывают показатели всех осей. Полученная сумма — «эквивалент 10-тонной нагрузки» автомобиля или автопоезда — является основным фактором воздействия ТС на дорогу. Как видно из приведенной схемы, при полезной нагрузке, большей на 3,4 т (на 20,5%), разница в воздействии на дорогу увеличивается всего в 1,68 раза.
– Дорожники говорят о разнице в воздействии легкового и грузового автомобиля в 60 тыс.–160 тыс. раз. На первое восприятие, 1,68 раза — совсем небольшая плата за безопасность. Я правильно понимаю вашу логику?
– Да, правильно. По дорогам передвигаются грузовые автомобили и автопоезда с разной полной массой и разных конфигураций. Даже при одинаковой полной массе автопоезда и соблюдении осевых ограничений воздействие на дорогу при расчете через «эквивалент 10-тонной нагрузки» может отличаться в три раза. А между полностью и частично груженым автопоездом (полная масса 30 т) — в восемь раз (схема 7).
(схема 7)
Корректный расчет воздействия на дорогу возможен при наличии статистики конструкции автомобилей и автопоездов (схема 8) и распределения их полной массы (схема 9). Данные по Германии представлены выше. В России мне такие данные не попадались.

(схема 8)
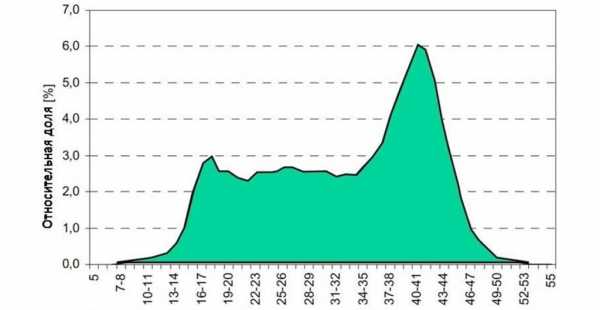
(схема 9)
– Существует ли диаграмма, наглядно демонстрирующая отличия осевых ограничений в России и Германии с точки зрения безопасности размещения грузов?
– Пожалуй, отличия в плане погрузки с соблюдением российских и европейских осевых ограничений — одна из самых ценных глав рекомендаций «Траско» по креплению груза.
На схеме 10 представлены отличия размещения груза для стандартного европейского пятиосного автопоезда в составе тягача с колесной формулой 4х2 и трехосного полуприцепа с внутренней длиной 13,6 м. Голубая линия — допустимая максимальная загрузка с соблюдением осевых ограничений в России в зависимости от расположения центра тяжести. Оранжевая линия — то же самое для Германии. Рассматривая два графика, отчетливо видим, что «российский» смещен назад, поэтому и груз приходится смещать назад.
(схема 10. Центр тяжести груза должен располагаться во внутренней части диаграммы:
1. Полезная нагрузка при расположении центра тяжести груза на расстоянии 6 м от передней стенки.
2. Интервал расположения центра тяжести для легальной погрузки груза весом 20 т.)
При установке равномерного груза длиной 12 м вплотную к передней стенке центр тяжести располагается на расстоянии 6 м (вертикальная зеленая линия). Как видно из схемы, для соблюдения российских осевых параметров при таком, самом безопасном расположении груза мы можем загрузить всего 16,6 т. По европейским же правилам с таким расположением центра тяжести мы можем загрузить автопоезд почти до полной массы 40 т с полезной нагрузкой 24,4 т.
Ранее мы говорили об отсутствии в России требования о минимальной нагрузке ведущей оси тягача в размере 25%. Диаграмма графически показывает это отличие законодательства. В России фактически допускается ситуация отрыва ведущих колес тягача от дороги при соблюдении всех остальных весовых параметров (слайд 11) К сожалению, такова реальность приоритета сохранности дорог перед безопасностью.

(схема 11)
– А если использовать шестиосный автопоезд еще и с полной массой 44 т?
– В наших рекомендациях присутствует сравнение схемы нагрузки при использовании пятиосного и шестиосного автопоезда с соблюдением российских и европейских нормативов (схема 12).
(схема 12:
– шестиосный автопоезд полной массой 44 т с технической нагрузкой на сцепной шкворень полуприцепа 12 т;
– пятиосный автопоезд полной массой 40 т с допустимой нагрузкой на ведущую ось тягача 11,5 т;
– пятиосный автопоезд полной массой 40 т с допустимой нагрузкой на ведущую ось тягача 10 т;
– ограничение минимальной нагрузки ведущей оси двухосного тягача в размере 25% от полной массы;
– ограничение минимальной нагрузки ведущих осей трехосного тягача в размере 25% от полной массы;
– линия отрыва ведущей оси тягача.)
Казалось бы, при расположении центра тяжести в первой половине полуприцепа преимущества по БДД, минимальному воздействию на дорожное полотно и по эффективности логистики налицо. Однако опыт других стран говорит, что введение норматива полной массы 44 т для шестиосных автопоездов не так просто и однозначно.
В России ситуация еще сложнее. При 44 т допустимой полной массы осевые нагрузки остаются неизменными.
Логично использование шестиосных автопоездов полной массой 44 т для перевозки ISO — контейнеров 40’ и 45’. В отдельных странах применяется для лесовозов, молоковозов и зерновозов. В любом случае 44 т достигает за счет увеличения допустимой осевой нагрузки на прицеп или полуприцеп при сохранении ограничения полной массы на каждый модуль автопоезда. Например, для трехосных контейнерных полуприцепов нагрузка на прицепную тележку возрастает с 24 до 27 т. Физически вместо двух межосевых расстояний 1310 + 1310 мм появляется 1310 + 1410 мм.
Проблематика полной массы автопоезда 44 т:
- Для работы с трехосным тягачом с повышенной нагрузкой на седельно-сцепное устройство необходимы полуприцепы с усиленной узкой передней частью рамы. Такая комплектация дороже, поэтому не так часто встречается на рынке. Если использовать стандартный полуприцеп, предназначенный для двухосного тягача, то он прогибается (фото 4) и рама в передней части может сломаться;

(фото 4)
- При сцепке трехосного седельного тягача с полуприцепом, рассчитанным для работы с двухосным тягачом, чтобы при поворотах не задевать задней частью тягача полуприцеп, приходится сдвигать седельно-сцепное устройство назад на 300–350 мм (фото 5).

(фото 5)
Это приводит к перераспределению осевых нагрузок на седельном тягаче. Уменьшается нагрузка на рулевую ось, что отрицательно сказывается на управляемости автопоезда, особенно в непогоду. Машина упрямо едет по прямой.
- Контролировать характеристики полуприцепа для трехосного тягача сложнее.
- Современные возможности подъемных осей на тягаче и полуприцепе позволяют существенно и быстро изменять распределение осевых нагрузок при движении автомобиля и при прохождении статического или динамического весового контроля. Один из примеров — использование двухосного седельного тягача и четырехосного полуприцепа (слайд 13). При подъеме первой оси полуприцепа нагрузка на ведущую ось тягача может достигать 12–13 т.
(схема 13)
В европейских странах ответственность за алгоритм автоматической работы подъемных осей возложена на производителей подвижного состава. Как избежать данной ситуации при помощи АСВГК без отрегулированных правил в России?
- Увеличение полной массы автопоездов приводит к перемещению грузопотока с ж/д и речного транспорта на автомобильный, поэтому многие страны по-прежнему придерживаются лимитирования полной массы автопоезда в 40 т для большинства перевозок.
– Какое решение проблемы вы предлагаете?
– Решение может быть во ведении в России весовых норм, прописанных в Директиве ЕС 96/53 — в вариации Германии или Австрии: для всех типов дорог, по которым разрешено движение грузового транспорта и переход для части грузов и стратегических направлений на работу по схеме Европейской модульной системы (EMS). Пока этого не произойдет, тема обсуждения принципа работы АСВГК будет горячей.
Линейные индикаторы - transportszynowy.pl 9000 1
Указатели передают команды, приказы и информацию, относящуюся к железнодорожному движению, с помощью надписей и символов, размещенных на щитах, отображаемых фонарями или другими системами освещения, а также с помощью заданной формы и формы указателя.
Индикаторы, используемые в виде щитов, рекомендуется изготавливать из светоотражающих материалов. Управляющий инфраструктурой может потребовать исполнения конкретных индикаторов с отражающей поверхностью.
Ниже приведены общие рабочие путевые указатели, используемые в сети PKP PLK SA:
Индикатор W1 - «Указатель местоположения»
Указывает расположение предупредительного диска с семафором или диском пересечения, а на маршрутах с четырех- Блокировка пути автоматической линией - предпоследняя автоматическая блокада на трассе перед входным сигналом.
Индикаторы W1 на предупредительном диске и табличке ведущего
Индикатор W2 - «Указатели направления движения»
Указывает направление отправления поездов.Устанавливается на семафорный столб или на отдельный столб. Буква, составляющая название конечной станции или ближайшего узла, отображается, когда на семафоре отображается сигнал, разрешающий движение.
Индикатор W3 - "Индикатор отмены"
Означает, что соседний сигнальный или стоп-диск с правой стороны дорожки не соответствует дорожке, на которой стоит индикатор.
Индикатор размещается на сигнальном столбе или рядом с ним, на отдельном столбе.
Указатель W4 - "Указатель остановки"
Указатель служит для обозначения места на станции, остановки, до которой может доехать голова останавливающегося на ней поезда. Поезд, стоящий на стоянке, должен быть остановлен на таком расстоянии от указателя, чтобы движение путников было наиболее удобным. Индикатор расположен в конце платформы или перед правым поворотом пути, к которому он относится.
Индикатор W5 - "Скорость прокатки"
Указывает границу переката.Его ставят на тех путях, где есть необходимость постоянно обозначать границу, до которой разрешено движение. Выезд за пределы индикатора допускается только с разрешения диспетчера.
Индикатор используется независимо от маневровых дисков.
Индикатор W6 - "Индикатор предупреждения"
Означает, что должен быть подан сигнал Rp1 "Внимание".
Индикатор W6a - «Указатель железнодорожного переезда»
Индикатор информирует о наличии железнодорожного переезда или переезда, оборудованного полуавтоматической или автоматической системой железнодорожного переезда, сцепленного или зависимого в станционных устройствах, обеспечивающего охрану всей ширины железнодорожно-автомобильного переезда или переезда.
Индикатор W6b - «Индикатор предупреждения о железнодорожном переезде или переезде»
Индикатор информирует о наличии железнодорожного переезда или переезда, оборудованного полуавтоматической или автоматической системой переезда, без подключения или зависимости в станционными устройствами, или не оборудованными устройствами безопасности движения.
Этот индикатор обязывает водителя подать сигнал Rp 1 "внимание".
Индикатор W7 - "Индикатор работы пути"
Означает, что сигнал Rp1 "Внимание" должен быть подан для предупреждения бригад, работающих на пути, о приближающемся тягаче.
Индикатор W8 - «Индикатор ограничения скорости»
Указывает на необходимость снижения скорости движения. Цифра или число на указателе показывает допустимую скорость в десятках километров в час. Указатель устанавливается на тормозном пути, применимом к железнодорожному пути перед началом участка, на котором необходимо двигаться с пониженной скоростью
Индикаторы W9 - «Указатель участка с ограниченной скоростью»
Указывает начало или конец участка, который необходимо пройти с ограниченной скоростью.Эти индексы устанавливаются соответствующим образом после индекса W8. Число на приборе показывает разрешенную максимальную скорость. Индикатор в конце участка пониженной скорости с черной буквой «С» указывает на то, что ограничение скорости распространяется на голову поезда.
Индикатор W10a — «Индикаторы секции толкания»
Указывает, что необходимо начать проталкивание.
Индикатор W10b — «Индикаторы секции толкания»
Указывает, что следует прекратить толкание.
Индикатор W11a - "Обзорные указатели"
Означает, что за указателем следует диск предупреждения о въезде или запрещающем сигнале либо светофоре, сигнальные изображения которых могут быть не видны постоянно с требуемого расстояния
Индикатор W11a ( уменьшенная версия)
Этот индикатор используется, когда невозможно установить индикатор нормального размера в манометр из-за риска перерегулирования.
Индикаторы W11a установлено, что перед сигнальным циферблатом всегда три, а перед семафором, сигнальные изображения которого могут быть не видны непрерывно с требуемого расстояния, всегда четыре последовательно следующие прямоугольные или квадратные белые таблички соответственно: с три, две и одна или четыре, три, две и одна черные полосы, поднимающиеся по диагонали слева направо.
Индикатор W11b - "Опережающие указатели"
Означает, что за указателем находится предупреждающий диск въездного сигнала поста, где начинается электрифицированный участок.
Индикатор W11p - «Линейный индикатор»
Указывает на наличие предупреждающего диска за индикатором на расстоянии 200 м.
Индикатор W11p - "Линейный индикатор"
Указывает на наличие предупреждающего диска за индикатором на расстоянии 400 м.Индикатор должен располагаться перед диском предупреждения о проезде, сигнальные изображения которого могут быть не видны непрерывно с требуемого расстояния. В этой ситуации первый указатель имеет два черных треугольника, если смотреть по направлению движения, а второй указатель — один треугольник.
Индикатор W12 - "Индикатор паровой машины"
Означает, что зольник должен быть сбрызнут водой и крышки зольника должны быть закрыты. Индикатор относится к паровозам и располагается на расстоянии 200 м от мостов, виадуков и т. д.
Индикатор W13 - «Индикатор пути»
Означает, что ножи должны быть подняты, а лопасти снегоочистителя закрыты, а также соблюдать особую осторожность при работе с трамбовщиками, очистителями балласта и другими путевыми машинами. Индикатор W 13 используется для обозначения мест, в частности, проезда, моста, стрелочного перевода, устройств взаимодействия пути с транспортным средством, датчика рельса, устройств обнаружения горячей оси и плоского пятна или других устройств на пути, перед которыми должны находиться ножи. подняты, а крылья плуга закрыты, очистительной машине при очистке пути от снега и в которой следует соблюдать особую осторожность при работе с трамбовками, щебнеочистителями и другими путевыми машинами.
Препятствия, расположенные на расстоянии менее 150 м одно от другого, должны быть обозначены как одно препятствие индикатором W 13 в виде двух полос
Индикатор W14 - «Указатель участка с ограниченной скоростью»
Указывает начало или конец участка, по которому он едет с пониженной скоростью. Цифра на манометре показывает допустимую скорость. Они расположены за циферблатом с сигналом светофора D6 «Выпустить передачу». Если на указателе в конце участка пониженной скорости стоит черная буква «С», это означает, что ограничение скорости распространяется на голову поезда.
Индикатор W15 - "Указатель смены местоположения"
Означает, что светофор, проблесковый маяк или предупреждающий диск, которые не расположены там, где они должны быть расположены, тем не менее относятся к дорожке, на которой стоит указатель.
Пример расположения индикатора W15
Индикатор W16 - «Указатель остановки пассажира»
Означает, что за указателем на тормозном пути находится остановка пассажира.
Указатель W17 - "Указатель уклона"
Означает, означает место на перекрестках, где путь может быть занят подвижным составом.
Индикатор W18 - "Индикатор автоматической блокировки линии"
Индикатор крепится к мачте последнего сигнала автоматической блокировки линии. Это означает последний блокирующий сигнал перед входным сигналом.
Индикатор W19 — «Предупреждение об остановке запрещено»
Означает, что расстояние между двумя следующими светофорами или между следующим предупреждающим диском и светофором короче тормозного пути, действующего на линии.
Если индикатор горит, он загорается, когда на семафоре отображается сигнал разрешения движения.
Сигнал S6 и горящий индикатор W19
Индикатор W20 - «Индикатор отсутствия тормозного пути»
Означает, что расстояние между предупреждающим диском или светофором, на котором расположен индикатор, и ближайшим светофором меньше, чем это для заданного тормозного пути.
Если индикатор горит, он загорается, когда на семафоре отображается сигнал разрешения движения.
Индикатор W21 - «Индикатор увеличения скорости»
Индикатор, размещенный на сигнальной мачте, означает, что движение за этим сигналом, передающим сигнал, разрешающий движение со скоростью 40, 60 или 100 км/ч, может происходить с большей скоростью, не превышающей значения, определяемого этим показателем.
Одновременно с сигналом разрешения движения на семафоре отображается тускло-белая цифра на черном фоне. В случае, если семафоры передают сигналы только для движения по стрелочным переводам в обратном направлении, а тип стрелочных переводов допускает движение со скоростью выше, чем указанная сигналом, разрешающим этот семафор, может использоваться индикатор W 21 в виде таблица и цифра белого цвета из световозвращающих материалов
Индикатор W22 - «Указатель движения грузового поезда»
Означает, что грузовой поезд может пройти без остановки на пониженной скорости до 20 км/ч мимо светофора за автоматическая блокировка линии с указанием сигнала «Стоп».Он распространяется только на тяжеловесные грузовые поезда и монтируется на мачте ступенчатого сигнала, размещенного на возвышении более 6 ‰ по тормозному пути.
Индикатор W23 - "Указатель изолированного участка"
Означает начало пути или стрелочного участка, оборудованного устройством контроля занятости и стрелочными переводами (например, изолированный участок). Индикатор в виде полосы информирует о месте, перед которым должен остановиться подвижной состав для включения переключения стрелочного перевода.
Индикатор W24 - "Указатель встречного направления"
Означает въезд на колею двухпутной или многопутной колеи в направлении, противоположном основному (прежнее: движение по встречной колее). Сигнал отображается на индикаторе, когда на семафоре отображается сигнал, разрешающий движение.
Индекс W25 - "Индекс обогрева"
Указывает на станцию электрообогрева вагонов и начало обогрева.
Как только на пути, к которому относится индикатор, начинается прогрев вагонов, на индикаторе отображается номер пути, стрелка и молния красного цвета.
Этот показатель применяется в учреждениях, обслуживающих подвижной состав, на стоянках, где имеются пункты электрообогрева вагонов.
Указатель W26a - «Указатели направления движения»
Указатель W26a означает переход с группы путей дальнего следования на группу путей пригородного сообщения. Сигнал отображается на индикаторе, когда на семафоре отображается сигнал, разрешающий движение.
Указатель W26b - «Указатели направления движения»
Указатель W26a означает переход с группы пригородных путей на группу путей дальнего следования.Сигнал отображается на индикаторе, когда на семафоре отображается сигнал, разрешающий движение.
Сигнал S10 и световой индикатор W26b
Индикатор W27 - "Индикатор изменения скорости" (снято - заменено на 27а)
Указывает точку перехода и максимальную разрешенную скорость движения от этой точки. Число в десятках километров в час указывает на ограничение скорости. Индекс использовался до введения индекса W27a.
Индикатор W27a - "Индикатор изменения скорости"
Указывает место изменения и максимальную разрешенную скорость движения с этой точки. Число в десятках километров в час указывает на ограничение скорости. Индикатор относится к вновь построенным маршрутам.
Индикатор W28 - "Индикатор радиоканала"
Означает, что с этого момента радиоканал поезда меняется на указанный в индикаторе. Он информирует машиниста о месте, где необходимо изменить канал радиосвязи поезда, и о номере радиоканала, действующем с этого места.После прохождения указателя машинист должен переключить радиотелефон на указанный поездной канал радиосвязи и как можно быстрее установить связь с ближайшим постом управления движением, работающим на этом канале.
Индикатор W29 - "Индикатор установления связи"
Означает, что необходимо установить радиосвязь с выделенным участком трафика. Применяется на участках железнодорожного пути, где движение осуществляется на основе радиотелефонной связи между дежурным участком и водителем тягового или вспомогательного транспортного средства.
Индикатор W30 - "Индикатор взвешивания поезда"
Указывает скорость, с которой должны двигаться автоматические весы при взвешивании поезда. Индикатор загорается, когда дается разрешение на проезд через платформенные весы.
Индикатор W31 - «Сброс индикатора»
Указывает на то, что индикатор, под которым находится этот индикатор, недействителен (неактивен).
Индекс W32 - "Индекс головы поезда"
Означает место, где останавливается передняя часть поезда с длиной (в метрах), определяемой этим индексом.
Индикатор W33 - "Индикатор вступления в силу системы ERTMS/GSM-R"
Указывает место изменения системы радиосвязи поезда и применимую с этого момента систему ERTMS/GSM-R.
Индикатор W34 — «Индикатор окончания срока службы ERTMS/GSM-R»
Указывает на окончание действия системы ERTMS/GSM-R, действующей до этого момента.
Индикатор W35 - "Указатели ограничения скорости заднего хода"
Индикатор означает, что ограничение скорости на перекрестке или снижение скорости движения распространяется только на поворот.Он размещается над индикатором W8 и над индикатором W9 в начале раздела фиксированного ограничения скорости.
Индикатор W36 - "Указатели ограничения скорости заднего хода"
Индикатор означает, что временное ограничение скорости на перекрестке или снижение скорости движения распространяется только на движение задним ходом. Он расположен над циферблатом D6 и индикатором W14 в начале раздела временного ограничения скорости.
Эпизод 51 - "Железнодорожные переезды - часть 2" - Правила дорожного движения пятницы
Эпизод 51 - "Железнодорожные переезды - часть 2"
Дата публикации 19.02.2021В рамках очередного эпизода пятничной программы сотрудники Департамента дорожного движения Главного управления полиции в Кракове на основании Постановления министров инфраструктуры и внутренних дел и администрации о дорожных знаках и сигналах подготовили краткое напоминание о дорожных знаках, касающихся железнодорожных переездов.
Машиночитаемый текст:
[На рисунке слева изображен предупреждающий дорожный знак А-9 "Железнодорожный переезд со шлагбаумом"]
[Рисунок с правой стороны предупредительного дорожного знака А-10 "Железнодорожный переезд без шлагбаумов"]
Предупреждающий знак А-9 "Железнодорожный переезд со шлагбаумом" предупреждает
о железнодорожном переезде, оборудованном шлагбаумами или полушлагбаумами.«Железнодорожный переезд без шлагбаумов» - предупреждающий знак А-10 предупреждает о железнодорожном переезде без шлагбаумов и
. в полуплотинах.
Эти знаки обычно размещают на расстоянии 150-300 м перед движением по дорогам, где ограничение скорости более 60 км/ч и на расстоянии до 100 м по другим дорогам.
[Слева рисунки баров индикатора с одной линией, с двумя линиями и с тремя линиями. Линии располагаются на них по диагонали (левая сторона вверх, правая сторона вниз)
[Справа рисунки баров индикатора с одной линией, с двумя линиями и с тремя линиями.Линии располагаются на них по диагонали (левой стороной вниз, правой стороной вверх)
"Указательные столбы" показывают расстояние от предупреждающего знака до проезда. Если под знаком А-9 или А-10 стоит столб с тремя линиями, то столб с двумя линиями составляет 2/3 расстояния между предупреждающим знаком и проездом, а столб с одной линией — 1/3 расстояния. Столбы G-1a, G-1b и G-1c, показанные справа, размещены с правой стороны дороги, а столбы G-1d.Показанные слева G-1e и G-1f размещены на левой стороне дороги.
[Внизу страницы схематично показано расположение предупредительного знака А-10 с индикаторной полосой с тремя линиями и остальными указательными столбами перед гусеницей. Между предупредительным знаком и дорожкой расположена размерная стрелка с надписью: «150 - 300 м при допустимой скорости воздуха. 60 км/ч или до 100 м для других дорог». Между столбом с двумя линиями и дорожкой расположена размерная стрелка со словом «2/3 расстояния».Между однострочным столбом и дорожкой расположена размерная стрелка с надписью «1/3 расстояния».]
Если в силу местных условий предупредительный знак размещается ближе к проезду, под предупредительным знаком ставится столб с двумя линиями, а посередине дистанции - столб с одной линией.
[Справа схематически показано расположение предупреждающего знака А-10 с индикаторной полосой с двумя линиями и индикаторной полосой с одной линией перед гусеницей.Между предупредительным знаком и однострочной полосой имеется размерная стрелка, на которой написано «1/2 расстояния». Между однострочным столбом и дорожкой есть размерная стрелка со словом «1/2 расстояния».]
Если предупреждающий знак размещается в непосредственной близости от прохода, используется только однострочная индикаторная полоса под предупреждающим знаком.
[Слева схематично показано положение предупреждающего знака А-10 с индикаторной полосой с одной линией непосредственно перед гусеницей.Между предупреждающим знаком и дорожкой есть размерная стрелка со словом «прямой».]
Знак Г-3 "Св. Андрей перед однопутным железнодорожным переездом» (показан слева) сообщает, что на переезде только один путь. Знак Г-4 "Св. Андрея перед многопутным железнодорожным переездом» (рисунок справа) сообщает, что переезд состоит более чем из одного пути. Оба этих знака указывают место, где транспортное средство может остановиться из-за движения поезда или другого рельсового транспортного средства.Если знак Б-20 «СТОП» не размещен вместе со знаком Г-3 или Г-4, то остановка транспортного средства перед проездом требуется только в связи с проездом рельсового транспортного средства.
[Слева рисунок дорожного знака Г-3 "Св. Андрея перед однопутным железнодорожным переездом.]
[Справа рисунок дорожного знака Г-4 "Св. Андрея перед многопутным железнодорожным переездом.]
Марка Г-2 «Живая сеть» означает, что контактная сеть подвешена над железнодорожным переездом.
[Внизу слева рисунок дорожного знака Г-2 "Живая сеть".]
.Юридический журнал
Как выбрать конкретное место в поезде
- Миколай Фрончак
- /
- 3 декабря 2019 г.
В каких поездах можно выбрать место?
Новая льгота, введенная ПКП Интерсити, распространяется на всех пассажиров, которые будут пассажирами поездов новейшего парка перевозчика. Речь идет о современных сложных поездах, таких как Pendolino, Flirt3 и PesaDART. Они уже не редкость на польских путях, и многие поезда дальнего следования обслуживаются этими поездами.
С какого момента можно выбрать место в поезде?
Новое удобство распространяется на стыковки, выполняемые с 15 декабря 2019 года, то есть с даты введения нового «годового» расписания в таблицы прилета и вылета.
Как поясняется в объявлении ПКП Интерсити, введение т.н. графическое представление мест — дань уважения пассажирам. Как показывает статистика, количество пассажиров, решивших путешествовать по железной дороге, постоянно растет. Преимуществом является современный автопарк и другие удобства.Одним из них также станет возможность выбора места в поезде.
ЧИТАЙТЕ ТАКЖЕ Поезд опаздывает? Вы имеете право на компенсацию!
Графическое представление мест на сайте. Как это работает?
Если вы решите путешествовать поездом, который позволяет выбрать место при покупке билета, на нашем экране появится графическое представление мест. Перед этим необходимо указать количество пассажиров, для которых мы хотим заказать поездку, их скидки и возможную необходимость использования специальных мест.Последний из упомянутых вариантов касается людей с ограниченными возможностями, пассажиров, выбравших семейное купе, или людей, путешествующих на велосипеде. Отображаемая графика будет похожа на те, которые встречаются при покупке авиабилетов. Выбору будет способствовать расположение мест в данной части поезда.
Система спроектирована таким образом, чтобы пассажир мог легко отметить интересующее его место. Чтобы это стало возможным, внизу экрана нужно найти кнопку "выбрать место на схеме".Это момент, когда пассажир решает, предпочитает ли он сидеть у коридора или хочет любоваться видом за окном. Кстати, вы легко узнаете, где находится ближайший выход, туалет или специальное место для крупногабаритного багажа.
По данным ПКП Интерсити, это очень удобно для людей, путешествующих большими группами - семьей или друзьями. Таким образом, вы можете забронировать места таким образом, чтобы сидеть близко друг к другу.
ЧИТАЙТЕ ТАКЖЕ Путешествие на поезде с собакой.Нужно ли покупать отдельный билет для собаки?
Насколько популярна онлайн-покупка билетов?
Поляки любят покупать билеты на поезд онлайн. Это все чаще можно увидеть на кассах, где мы не видим таких очередей, как четыре-пять лет назад. Только за первые три квартала 2019 года 46% всех пассажиров приобрели билеты через сайт intercity.pl или специальное мобильное приложение. Это больше, чем процент людей, выбирающих традиционные кассы, которые посетили в общей сложности 42% путешественников.
По мнению экспертов, процент людей, использующих онлайн-форму продажи билетов, будет планомерно увеличиваться. Аналогичная тенденция наблюдается, в частности, в в Западной Европе и Скандинавии. Все более удобные формы безналичной оплаты и обширные приложения для обслуживания пассажиров будут постепенно снижать роль билетных касс на вокзалах, однако они по-прежнему будут сохраняться для пожилых пассажиров или для обслуживания пассажиров в экстренных ситуациях.
Спасибо, что дочитали нашу статью до конца.Если вы хотите быть в курсе юридическая информация, пожалуйста, посетите наш веб-сайт снова!
Если вам понравилось сам Поделитесь статьей с другими, поделившись ею в социальных сетях - ниже у вас есть быстрые ссылки на акции.
-изменений-в-расписании-s71-21-23-06 | Koleje Śląskie - региональный железнодорожный перевозчик
Замещающая шина связи на линии S71
Секция, на которой ZKA : Mikołww - Czerwionka
Срок действия достоверности : 21 - 23 июня 2021 г.
Причина : Реконструкция łaziska górne brada, ремонт железнодорожного перекрестка на Orzesion Червёнка - Червёнка - маршрут
Сфера применения ZKA : Все поезда Колея Силезского
Организация движения и пересадок :
Направление Рыбник
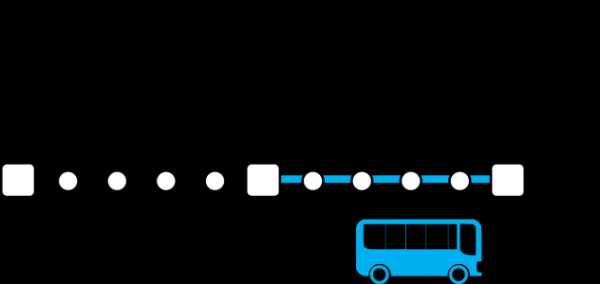
Будут запущены две автобусные линии - экспресс и обычный .Экспресс-линия будет проходить по автомагистрали Катовице - Червёнка без промежуточных остановок, что позволит быстро добраться до поездов в направлении Рыбника. Каждый поезд также будет курсировать по регулярному маршруту , который соединит Миколув с поездами из Катовице или Червёнка с поездами в направлении Рыбника.
Направление Миколув, Катовице
Будут запущены две автобусные линии - экспресс и обычный .Экспресс-линия будет курсировать по автомагистрали Червёнка - Катовице без промежуточных остановок, что позволит быстро добраться поездами из Рыбника в Катовице. Для каждого поезда будут также рейсы регулярной линии , которые соединят Миколув с поездами в направлении Катовице или Червёнка с поездами в направлении Рыбника.
Пассажиры с ограниченной подвижностью:
Автобусы регулярного маршрута позволяют перевозить лиц с ограниченной подвижностью - линия обслуживается низкопольными транспортными средствами.
О поездке лиц с ограниченной подвижностью на экспресс-автобусе необходимо сообщить по номеру +32 428 88 88 .
Перевозка велосипедов:
В автобусах регулярного маршрута перевозка велосипедов внутри транспортных средств возможна только в специально отведенном месте, когда велосипед не мешает передвижению транспортного средства. Путешественник с велосипедом обязан уступить место инвалиду или человеку с детской коляской, а при необходимости покинуть транспортное средство.Путешественник также несет ответственность за надлежащее крепление велосипеда во время поездки. Наличие велопроездного билета не является гарантией места в транспортном средстве.
Перевозка велосипедов в автобусах экспресс-линии невозможна.
Остановочные пункты сменного автобуса
| Направление: Червёнка | |
| Название автобусной остановки | Местоположение |
| Катовице 90 110 | Katowice автобусная остановка Andrzeja Dworzec (Катовице, ул.Андрей) |
| Миколув 90 110 | Автовокзал Миколув Железнодорожный вокзал (Миколув, Дворцовая площадь) 90 110 |
| Лазиска Горное 90 110 | Автобусная остановка Железнодорожный вокзал Лазиска Гурне (Лазиска Гурне, ул. Дворцова) |
| Лазиска Горне Брада 90 110 | Площадь перед зданием железнодорожной остановки (Лазиска Гурне, улица Колейова) |
| Арахис | Автобусная остановка Железнодорожный вокзал Ожеше (Ожеше, ул. Дворцова) |
| Ожеше Яськовице 90 110 | Площадь рядом с остановкой поезда (Ожеше, ул.Вожатые) |
| Червёнка | Площадь рядом с остановкой поезда (Червёнка, ул. Колейова) | 90 111 90 104 90 105 Направление: Миколув, Катовице 90 110
| Червёнка | Площадь рядом с остановкой поезда (Червёнка, ул. Колейова) |
| Ожеше Яськовице 90 110 | Площадь рядом с остановкой поезда (Ожеше, ул. Райцы) |
| Арахис | Автобусная остановка Orzesze Dworzec PKP (Ожеше, ул.Дворцова) |
| Лазиска Горне Брада 90 110 | Площадь перед зданием железнодорожной остановки (Лазиска Гурне, улица Колейова) |
| Лазиска Горное 90 110 | Автобусная остановка Железнодорожный вокзал Лазиска Гурне (Лазиска Гурне, ул. Дворцова) |
| Миколув 90 110 | Автовокзал Миколув Железнодорожный вокзал (Миколув, Дворцовая площадь) 90 110 |
| Катовице 90 110 | Katowice автобусная остановка Andrzeja Dworzec (Катовице, ул.Андрей) |
Новая страница 1
АВТОМАТИЧЕСКОЕ УСТРОЙСТВО СИГНАЛИЗАЦИЯ О ПУТЕШЕСТВИИ.
НИЖЕ МАТЕРИАЛ БУДЕТ ВЫБРАН ИЗ ИНЖЕНЕРНЫХ РАБОТ ДИПЛОМ.
Автор диссертации - ин. Марек Моджеевский.
Материал опубликован с согласия автора.
автоматические устройства переездная сигнализация (в аббревиатуре SSP) используются для обеспечения безопасности движения на пересечения дорог с железнодорожными путями. Эти устройства р срабатывают путевые датчики при приближении поездов проход, находившийся в зонах воздействия систем распознавания движение подвижного состава и направление или используемые рельсовые цепи; есть эти возможность ручного управления устройствами ССП.
Движение по переезду обеспечено устройствами предупреждающие знаки в виде светофоров, дополненные возможно акустический сигнал и одна или две пары ступенек, w в зависимости от местных условий на перекрестке произведение индекса трафика и максимальная скорость поезда.
Эта защита заключается в срабатывании предупредительных устройств на переходе не менее чем за 30 с до выхода поезда на рельсы и выключается примерно через 5 с момента выезда с маршрута последней оси.
Имеется возможность подключения устройств ССП к устройствам управления движением поездов, например, автоматическим заграждения линии, станционные участки пути.
Безопасность системы обеспечивают два независимо работающих контура , и б с контролем их одновременной и корректной работы.
За сокращение времени предупреждения участников дорожного движения до прибытия поезда пересечении, могут использоваться системы определения скорости.
Для поездок на линиях со скоростью выше 140 км/ч система SSP должна он преграждает путь широкий.
Общие принципы работы устройств показаны на чертеже 2.1.
Рис. 2.1. Схема блок устройств автоматической переездной сигнализации:
Устройства управления Ст, У1, У3 - коммутационные устройства, У2 - устройства коврик,
S1, S2 - светофоры, Z1, Z2 - шлагбаумы, закрывающие правую половину дороги
Устанавливается на соответствующем расстоянии от прохода Распределительные щиты W1 и W3. Поезд, приближение к перекрестку, в зависимости от направления движения, влияет на одну из этих систем.Сигнал о приближении поезда передается в церковь св. Это вызывает раннее предупреждение о сигнализаторах S1 и S2 и опциональное замыкание Z1 и контактов Z2. Завершите предупреждение и откройте его. вызов - независимо от направления движения - происходит в момент окончания воздействия поезда на систему маршрутизации W2 плюс задержка 5 секунд. Поезд, отправляющийся и действующий на крайних Система W сбрасывает цепи управления и сигнализация возвращается в состояние стоять рядом с.
Состояние устройств и их корректная работа контролируется ретранслятором, расположенным в диспетчерская или пост машиниста.
Предупреждающие экраны — еще одна форма передачи информации о состоянии оборудования. пересечение. Они расположены на каждой трассе и во всех направлениях движения в тормозной путь от пути. Они информируют водителя о состоянии сигналов на переправе.
Сигнальное оборудование можно разделить на устройствах: обнаружение поезда (путевые датчики, определяющие присутствие поезда в их зоны), устройства оповещения (светофоры, пороги и шлагбаумы, звонки, предупреждающие диски о пересечении), рулевое управление и контроль (повторители), источники питания.
Технологии исполнение систем ssp.
Самодействующие системы светофоры железнодорожных переездов, эксплуатируемые на польских железных дорогах, завершены p в разных технологиях. За счет техники реализации функций управления мы можем разделить SSP на три группы: реле , гибридные и микропроцессоры. Около 28% поездок построены на технологиях реле, 58% в гибридной технологии (электронное реле) и 14% основано на микропроцессорной технике.
В группе релейных решений можно выделить два направления, первое это простые одноканальные схемы, построенные из реле рабочего класса N безопасно.S — сигнализация Ericsson DUN.
Второе направление – более сложные двухканальные схемы с использованием магнитные и телетехнические реле РЛ. Они включают сигнализацию от Группа КОБ.
Подробнее в группе релейно-электронных решений (СПА 1 2А) сигнализация содержала все больше и больше цифровых элементов, а количество и роль реле стало меньше. Функции управления становились все больше и больше. зоон. Появились внутренние функции и необходимость синхронизации работы может
В группе микропроцессорных решений (напр.SPA-4), эта технология требует прикладное программное обеспечение, соответствующее ситуации движения на пройдешь; внутренние соединения шкафов в непрограммируемых решениях элементы управления были сделаны для конкретного прохода. В решениях с точки зрения микропроцессорных устройств вопрос важен безопасная передача, самотестирование или взаимное тестирование цепи. Использование драйверов ПЛК позволило расширить функции управления и контроль. Что нового, так это регистрация событий и истории работы ССП, которая позволяет оценить работу отдельных устройств и системы в целом.
Устройства взаимодействия.
Задачей устройств взаимодействия является передача сигналов информирование о наличии рельсового транспортного средства в заданном месте пути, направлении его движения и, возможно, распознанной скорости. Эти сигналы передаются в шкаф оборудования с кабелями.
Системы ssp адаптированы для работы с датчиками различных типов:
1. Датчик двойной тип EON 6 (подробнее ...) ( ПРИМЕЧАНИЕ - ОПЦИЯ подробнее ... ОТКРЫВАТЬ СТРАНИЦЫ В НОВОМ ОКНЕ)
2.Датчик ЭЛС - 3 (магнитный) (подробнее...)
3. Датчик магнитный CTI (подробнее...)
4. Датчик механическая ЭЛС-6 (подробнее...)
5. Датчик одноместный ЭОК-1 (подробнее...)
6. Беспроводной Датчик поезда ЭОС-4 (подробнее...) 9000 9
Устройства контроль.
Задачей устройств управления является выработка сигналов включить
и выключить сигнализаторы на основании информации, полученной от устройства взаимодействия (датчики).В зависимости от стадии продвижения технологические ссп, это могут быть: реле, электронные блоки МЭР или контроллеры ПЛК.
Устройства предупреждающие знаки.
Предупреждающие устройства пересекут его два, три или четыре светофора, каждый по 2 камеры Красный свет попеременно мигает с частотой l Гц. Коморские острова р расположены горизонтально и врозь. Можно встретить более старые типы сигнализации однокамерные сигнализаторы. Дополнительно сирена может быть оснащена акустический сигнал в виде бесплатного звонка или зуммера.Кроме того, проход может комплектоваться двумя электрическими приводами турникетов с закрывающими вибрациями правая сторона дороги, или четыре таких привода с вибрациями, закрывающими обе половины дорога.
Также на тропе есть сигнальные устройства в виде щитов предупреждающие знаки пересечения. Сигнализация может быть оснащен предупреждающими дисками в стандартном количестве от 1 до 4, информируют диски предупреждения о проезде машинистов поездов о состоянии устройств ССП на переезде. Циферблаты настроены на расстояние тормозного пути поезда от проезда, которому предшествует индекс W11p, размещается в 200 м от мишеней со зданиями рядом с ними Электромагниты путевые ШП.
Устройства контроль.
Задача устройства управления аппаратным шкафом – вырабатывать управляющий сигнал, который с помощью диспетчерской группы, находящейся на остановке движения, информирует обслуживающий персонал о работе сигнализации.
Устройство дистанционного управления (ретранслятор) в виде блока управления ERP он размещается на дорожной станции и используется для индикации текущего состояния сигнализация и запись ошибок во время работы сигнализации, и дистанционное отключение устройств сигнализации на переезде.
В новейших видах сигнализации есть возможность дистанционного отключения устройства ССП.
Повторители Тип ERP, используемый в сигнализации SPA
1. ЭРП-3 (подробнее...)
2. ЭРП-4 (подробнее...)
3. ERP-5000 (подробнее...)
4. ERP-5100 (подробнее...)
5. ЭРП-6 (подробнее...)
Модули диагностические тесты отдельных типов подвида
Потому что УЗК обычно устанавливается на станции движения, поэтому в случае непосредственного ремонта или диагностики место установки аппаратуры и шкафов электропитания использование информации доступ через УЗК может быть затруднительным.Эти функции стали доступны только после внедрения микропроцессорной техники в устройства ССП.
1. Местный диагностический прибор ЭЗГ-1 в СПА-4 (подробнее ...)
2. Мод. диагностический ССП типа СПА-2Б ( подробнее...)
3. Устройства дистанционное управление и диагностика в сигнализации типа РАСП-4 (подробнее...) 9000 9
4. Устройства дистанционное управление и диагностика в сигнализации типа БУЭС 2000 (подробнее...) 9000 9
Устройства источники питания.
Вспомогательный Источником питания системной аппаратуры являются буферные батареи. заряжается от двух импульсных источников питания, один для канала А, а другой для канал B, которые подключены к электросети напряжения переменное напряжение 220 В / 50 Гц, являющееся основным источником питания.
Системы ssp работала на польских железных дорогах.
1. ССП типа COB-58 (подробнее...)
2. ССП типа COB-63 (подробнее...)
3. ССП типа СПА-1 (подробнее...)
4. ССП типа СПА-2 (подробнее...)
5. ССП типа СПА-2А (подробнее...)
6. ССП типа СПА-2Б (подробнее...)
7. ССП типа СПА-4 (подробнее...)
8. ССП типа NE BUE 90E PL (подробнее...)
9. ССП типа БУЭС 2000 (подробнее...)
10. ССП типа РАСП-4 (подробнее...)
Резюме.
О реализации идеи Автоматы управления движением на железнодорожном переезде сыграли решающую роль экономические факторы и развитие эстафетной техники. В конце лет на пятый день запущена первая в Польше автоматическая сигнализация конструкция:
SP-COB-58. Первые экземпляры этого SSP управлялись кнопками шины. Тип NEPTUN, а затем SP-COB-58 был построен с магнитными датчиками. Другим решением, основанным на релейной технике, является SP-COB-63, где использована модульная конструкция аппарата управления.Это там в первый раз Магнитные датчики, в том числе
с реле (системы ELB) создали точечное взаимодействие, распознающее направление движения и скорость поезда. Это дало возможность автоматического управления сигнализация на тех переездах, где останавливаются поезда (напр. пассажирские остановки) или выполняются маневры.
Разработать технику вызвало дальнейшее развитие устройств ССП. В 1981 году польские конструкторы во второй раз впервые применили элементы транзисторной и цифровой электроники (транзисторы, омические вентили ИЛИ-ИЛИ и триггеры Шмитта) для обработки сигналов z датчиков и реализации некоторых функций управления и контроля.Все еще группа реле класса С, типа JRF и ERF, выполняющих функцию, сохранена контрольно-исполнительная. Элементами воздействия служили датчики ЭЛС-3, а в зоне прохода дополнительно достроены датчики ЭОН-1 вся проходная площадь занята. Это была сигнализация СПА-1. Эти устройства они изготавливались из наборов (блоков), в которые помещались вилки реле и электронные системы MER. Однако в следующей версии (СПА-2) наборы были заброшены, а аппаратура управления состояла только из Электронные блоки МЭР.Реле типа JRF, в т.ч. с остальными электронными блоками они выполняли исполнительные функции и контроль. Сигналка была развитием СПА-2 и последним гибридным типом СПА-2А, в котором количество реле ограничено пятью: четыре пускателя навес на светофоре плюс поворотник, и в одном блоке существует несколько схем, реализующих определенную функцию в операции сигнализации. Это, несомненно, более удобочитаемо для технического обслуживания, когда в предыдущего типа одна функциональная система сигнализации будет реализована элементы размещены в нескольких командах MER.
Ас СПА-2А является новейшей разработкой ССП в области релейной защиты. электроника и СПА-2Б, первая построенная на микропроцессорной технике, кажется преднамеренным, чтобы сравнить их. Микропроцессорная сигнализация SPA-2B имеет Преимущества следующие:
1. Поколение сигнала WS одной из цепей передается на другую цепь и запускает этот сигнал в нем также. Поэтому все они всегда включены устройства оповещения. В СПА-2А возбуждение только одной системы вызывало работу только устройств, контролируемых этой системой.Это вызвало то В маяке вспыхнула только одна лампочка и только одна пара замкнулась пдргв. В настоящее время изображение производительности ssp всегда для участников дорожного движения. то же самое и не вводит его в bd
2. Повреждение цепи питания контроллера вызывает появление красных индикаторов непрерывной в системе, управляемой контроллером. Это дополнительная информация для пользователей дороги, требующие особого ухода.
3. Датчик контроля. Потеря сигнала от датчик включения типа "б" прерывает подачу сигнала на репитер.Потеря сигнала от датчик включения типа "с" прерывает сигнал на ретранслятор и дополнительно включает сигнализаторы пройдешь.
4. Датчики присев (при переходе) наслаждаться как роль распознавания направления, так и активацию сигнализации, если над ними поезд. В сигнализации СПА-2А невозможно было выполнить обе функции одновременно.
5. На между датчиками введен подсчет поездов. Если какой-либо счетчик достигает отрицательного значения или превышает значение 5, сигнализируется неисправность.
6. Изменено схема повторителя. В эту цепь введена гальваническая развязка, т.е. дополнительно защищает от повреждений, вызванных перенапряжением в линии.
7. Возможно более гибкое взаимодействие с различными устройствами SRK. Это просто адаптация ко всем типам устройств SRK.
8. Контролируемый имеется ряд нитей сигнальных ламп S3 и S4.
9. Контролируемый есть блок питания B
10. Введено небольшие временные сдвиги в управлении приводом (различия в несколько десять секунд).Благодаря этому кратковременная нагрузка на блоки питания и аккумуляторы меньше.
11. Цао вибрации приводов N3 и N4 контролируются системой В (аналогично системе управления эти диски).
12. Введено возможность диагностики. Благодаря модулям, установленным в драйверах диагностики, можно сразу определить неисправность в системе.
Дизайнеры отдельные системы автоматических устройств были сконструированы таким образом, что в случае сбоя системы он гарантирует, что SSP всегда переходит в состояние Безопасно.Для этого использовались различные методики проектирования. За Реле и электронно-релейные решения были лечением аппаратное обеспечение. В решениях с использованием микропроцессорной техники использовались программные операции, для которых характерна последовательная обработка данных, многорежимность и необходимость обеспечения надлежащих условий работы.
.Современные системы управления железнодорожным движением
Безопасность систем управления железнодорожным движением обеспечивается правильно подобранной технологией.
Система управления железнодорожным движением (СРД) отвечает за безопасное движение поездов по сети железных дорог, т.е. исключение их неконтролируемого движения и столкновений. С технической точки зрения это совокупность компьютеров, реле или механических устройств.В технике srk можно выделить среди прочих станционные системы (управление движением транспортных средств в зоне одного поста или множества связанных постов), линейные системы (управление правильной последовательностью движения транспортных средств между постами - станциями) или системы специального назначения. Эти системы взаимодействуют друг с другом посредством закрытых и открытых стандартов передачи, создавая компьютерные сети. Системы управления железнодорожным движением имеют иерархическую структуру.Диспетчеры и дежурные контролируют и направляют движение поездов на всем участке (например, через диспетчерские пункты), имея на мониторах обзор дорожной обстановки на маршруте и на отдельных станциях. Современный диспетчерский центр Kombud SA в Радоме показан на фото 1.

Рис. 1 Современный диспетчерский центр Kombud в Радоме
Условия эксплуатации требуют контроля и оперативного управления системой.Принятие иерархической структуры управления в сочетании с соответствующим управлением вызывает введение дополнительных процессов, связанных с обменом информацией о дорожном движении, документированием и архивированием событий, выдачей специальных команд. Иерархическая структура и основные задачи системы управления дорожным движением представлены на рис. 1.
Рис. 1 Иерархическая структура основных задач системы управления дорожным движением
Развитие компьютерных технологий и их внедрение в железнодорожные приложения привели к появлению множества решений, основанных на микропроцессорной технологии.Использование современных методик позволяет проводить самодиагностику, регистрировать повреждения и облегчать использование приборов. Согласно отчету ПЛК за 2012 г. компьютерные системы управления железнодорожным движением установлены на 126 участках СЦБ (в 2008 г. таких диспетчерских участков было 68), а железнодорожные и автомобильные развязки оборудованы современными компьютерными системами на 902 (в 2008 г. системы). Таким образом, виден значительный рост количества установленных современных систем SRK.
Приоритетной задачей при внедрении новых устройств управления железнодорожным движением является поддержание надлежащего уровня безопасности. В соответствии с классификацией UIC (Международный союз железных дорог) и CENELEC (Европейский комитет по нормализации электротехники) для железнодорожных систем введены четыре уровня полноты безопасности системы SIL. В Польше, как и в других странах Европейского Союза, отдельным системам SRK присвоены уровни безопасности.Два самых высоких уровня (SIL 3 и 4) означают, что человеческая смерть или потеря здоровья могут произойти в результате системной ошибки. Системы, отвечающие за движение поезда по железнодорожному полотну или используемые на пересечении железных дорог с вагонами, относятся к высшему 3-му и 4-му уровням безопасности. Вновь спроектированная и введенная в эксплуатацию система должна иметь сертификаты безопасности. Для этого реализуются соответствующие процедуры системного анализа. В настоящее время основным числовым критерием оценки системы является THR (Допустимый уровень опасности). Данный показатель определялся следующим образом
где: l и - интенсивность отказов для канала i, t d и -1 - время реакции системы на ошибку с момента ее создания для канала i.
Этот показатель учитывает такие параметры, как: время реакции системы на ошибку с момента ее обнаружения, время реакции системы на ошибку с момента ее возникновения, период циклического тестирования компонента системы. Для систем уровней 3 и 4 этот показатель принимает значения, указанные в таблице.
Табл. Значения THR для SIL 3 и 4
| ПОЛ (в час на функцию) | Уровень безопасности (Уровень полноты безопасности)
|
| 10 -9 90 045 ≤ ПОГ -8
| 4
|
| 10 -8 90 045 ≤ ПОГ -7
| 3
|
Как видно из формулы, для многоканальных систем значение THR определяется относительно низким значением времени диагностики (для рассматриваемых ниже систем оно составляет ок.1 с). В системах с одним каналом обработки значение THR соответствует интенсивности повреждения l. В этом случае добиться соответствующего уровня THR (SIL 3 и 4) практически очень сложно.
Концепция безопасных компьютерных систем, используемых на железных дорогах, предполагает очень небольшое количество отказов, что при полной независимости каналов обработки (2 или 3) гарантирует пренебрежимо малую вероятность двойного или множественного отказа, что является решающим фактором для катастрофического отказа .Современные компьютерные системы используют резервирование аппаратного и программного обеспечения и самотестирование, вводя многоканальную избыточную обработку данных. Схема двухканальной обработки показана на рис. 2.
Рис. 2 Схема двухканальной обработки данных
На рис. 3 показана общая структура современной системы управления и контроля за железнодорожным движением.
Рис.3 Общая структура современной системы управления и контроля за железнодорожным движением
Ведущая система
Мастер-система представляет собой совокупность правильно сконфигурированных и запрограммированных устройств, обеспечивающих работу диспетчера и выполняющих функции, необходимые для надлежащего диспетчерского управления, при соблюдении всех формальных и технических требований к таким системам. Помимо отслеживания и направления трафика, эта система также выполняет задачу обнаружения конфликтов и, при необходимости, корректировки трафика. Интеграция систем на уровне центра управления позволяет выполнять, анализировать, просматривать и передавать всю информацию, а также выполнять задачи, связанные с контролем и контролем трафика. В системе, показанной на рис. 3, рабочий стол компьютера EbiScreen выполняет функцию мастер-системы. Он действует как интерфейс между оператором и системой зависимостей. EbiScreen — это система локального и удаленного управления, реализованная на промышленных компьютерах.
Еще одним примером диспетчерской системы является ИЛТОР-2.Это мастер-система, которая работает непосредственно с системой SIMIS (эта система производства Siemens установлена, среди прочего, на станции Живец). Система ИЛТОР-2 представляет собой многофункциональную компьютерную систему, предназначенную для комплексного контроля и надзора за железнодорожным движением на участках с большим количеством станций движения. ИЛТОР-2 работает в режиме реального времени. В целях повышения надежности была использована аппаратная конфигурация и программное обеспечение, обеспечивающее доступность системы в случае повреждения некоторых компьютеров.ИЛТОР-2 представляет собой компьютерную распределенную систему с модульной структурой. Большинство модулей этой системы могут работать независимо. В состав системы ИЛТОР-2 входят следующие подсистемы:
- ИЛТОР-ЗС, дистанционное и местное управление железнодорожным движением;
- ИЛТОР-КР, управление движением;
- ИЛТОР-ДИАГ, система диагностики.
На рис. 4 показана многоуровневая структура системы ИЛТОР-2. Структура состоит из следующих слоев:
- Центр управления дорожным движением (ЦКР),
- Местный центр управления (LCS),
- Объекты управления (ОС).
Рис. 4 Уровневая структура системы ILTOR-2
Данная система может использоваться как в варианте, предназначенном для установки на одиночный пост, так и в качестве системы, поддерживающей несколько постов на участке железной дороги. С точки зрения функциональности ILTOR-2 может быть адаптирован для реализации индивидуальных функций пользователя. Система спроектирована таким образом, что каждая конфигурация системы, расположение отдельных устройств и соединения между ними могут быть спроектированы индивидуально.Компьютеры в системе соединены компьютерной сетью, выполненной в стандарте ETHERNET по технологии 10/100/1000 BaseT, включающей витую пару или оптоволокно. В случае с центральным компьютером он работает в конфигурации с горячим резервом. Оба компьютера имеют одинаковую конфигурацию. Сетевые устройства имеют соответствующую сигнализацию для диагностики их рабочего состояния.
Централизованные системы
Централизованные системы представляют собой n-канальную (обычно 2-х или 3-х) многомодульную структуру с соответствующим образом подобранной конфигурацией, выполняющую функцию задания форм сигналов в реальном масштабе времени в соответствии с действующими требованиями безопасности.Безопасность таких систем обеспечивается правильно подобранной технологией, в том числе программной структурой, реализующей отказоустойчивый принцип *. Из соображений безопасности используется аппаратная конфигурация, позволяющая сравнивать результаты, чаще всего «2z2». Соответствующий уровень безопасности можно получить, используя один главный компьютер и так называемую горячий резерв путем внедрения соответствующего программного обеспечения (обработка двух разных программ, написанных разными командами).Централизованные системы относятся к группе подстанционных устройств.
SIMIS-W
На станции Живец установлена современная централизованная система SIMIS-W (Sicheres Mikrocomputersystem von Siemens für den Weltmarkt). Система принадлежит к поколению электронных устройств управления Siemens. Установленная в Живце система SIMIS-W работает в конфигурации «2-в-3». Уровень зависимости выполняет основные функции обработки и управления.Блок ЦП, установленный в системе, принимает отдаваемые службой команды настройки, затем обрабатывает их и пересылает в пакеты передачи: на входы - INOM, а на выходы - UNOM. Из входных/выходных пакетов обработанные команды и сообщения передаются по двухканальным линиям передачи данных на/от внешних устройств, например коммутатора, семафора. Входные данные обрабатываются тремя компьютерами одновременно, а затем сравниваются с результатами двух других. В результате несовместимости данных одного из компьютеров он отключается, а два других канала обеспечивают корректную работу модуля.Пример конфигурации устройства показан на рисунке 5.
Рис. 5 Система SIMIS, конфигурация «2 из 3»
Для передачи информации используются две разные шинные системы. В случае выхода из строя какого-либо компонента системы сервисно-диагностический компьютер определяет место неисправности. На фото 2 показаны отдельные элементы системы SIMIS-W, установленной на станции Живец.
Рис.2 Элементы системы SIMIS-W, станция Живец
Электронный замок 950
Крупной централизованной системой, работающей на польских железных дорогах, является система Ebilock 950 (рис. 3). Основой системы Ebilock 950, установленной на станции Ченстохова Страдом, является семейство современных электронных и компьютерных полевых контроллеров STC, разработанных в Bombardier Transportation ZWUS, благодаря которым все компьютерное оборудование может быть расположено в одном месте.С точки зрения используемых сетей передачи система использует сети µLAN, LAN и WAN. В этой системе на уровне оператора выдаются соответствующие команды, которые в свою очередь передаются на уровень зависимости. На уровне оператора также извлекается информация о дорожной обстановке, состоянии устройств и их визуализация на мониторах (упомянутый выше EbiScreen). Система Ebilock состоит из компьютера с двойной зависимостью и двойной системы передачи и связи.При обнаружении неисправности система переключается с неисправного компьютера на другой исправный компьютер, о чем также уведомляется оператор системы. Главный зависимый компьютер отвечает за отправку команд и получение информации от полевых контроллеров, работающих в полевых условиях. В случае объектно-ориентированных контроллеров применялся упомянутый выше принцип отказоустойчивости, когда повреждение вызывает переход в безопасное состояние, что может проявляться, например, сигналом «встать на семафор».
МОР-3
Система МОР-3 производства Kombud SA в Радоме представляет собой современную многокомпьютерную систему, используемую для управления железнодорожным движением.Его основная задача — задавать ходы поездов, автоматически замедлять их, ставить и отпускать сигналы, ставить и отпускать точки и блокады. На рис. 6 представлена упрощенная схема зависимостей в системе.
Рис. 6 Схема зависимостей в системе МОР-3
Для обеспечения надлежащего функционирования система МОР-3 (рис. 3) оснащена диагностическими устройствами (полный обзор текущего рабочего состояния системы, включая аппаратное и программное обеспечение).Система может управляться удаленно или локально. Система была спроектирована как резервная схема «2z2». Два управляющих компьютера с разными результирующими кодами выполняют функции зависимости. Выходные сигналы обоих компьютеров постоянно сравниваются в защищенном компараторе. Система не будет генерировать управляющий сигнал, если сигналы обоих компьютеров не совпадают. В случае несоблюдения система переходит в безопасный режим, например, останавливает движение.
Рис.3 Элементы системы МОР-3
Линейные системы
Системы, действующие на железнодорожных путях, задачей которых является регулирование движения поездов между постами, называются линейными системами. Примером может служить система автоматической переездной сигнализации РАСП-4Ф производства Комбуд Радом, которая используется в основном для охраны железнодорожных переездов категорий «В» и «С» и дополнительно категории «А» (Фото 4).
Рис.4 Основные элементы системы РАСП-4
Для определения занятости путей использовалась современная система счетчиков осей поездов. Блок-схема автоматической переездной сигнализации РАСП-4Ф представлена на рис. 7. В состав системы входят, в том числе, основной контейнер (РАСП-КГ), аппаратные шкафы (РАСП-СА1, РАСП-СА2) и устройство дистанционного управления (РАСП-УЗК). Автоматическая переездная сигнализация РАСП-4Ф представляет собой устройство с резервным решением типа «2z2». С целью получения высокого уровня безопасности системы РАСП-4 использовано резервирование устройств:
- блоки управления и контроля с функцией самотестирования,
- исполнительный с функцией самотестирования,
- поставлять.
Рис. 7 Структурная схема автоматической переездной сигнализации РАСП-4Ф
В основном контейнере РАСП-КГ находятся, в том числе, два контроллера PLC, операторский терминал и набор блоков ввода/вывода.
Оборудование управления и контроля получает и анализирует сигналы от устройств взаимодействия с поездом и управляет внешними устройствами, такими как светофоры, приводы платных шлагбаумов или предупреждающие диски о переезде.Центральные блоки контроллеров ЦП1 и ЦП2 работают синхронно, проверяют наличие друг друга и обмениваются информацией о неисправностях. Автоматическая работа устройств контролируется устройством дистанционного управления РАСП-УЗК, являющимся ведущим контроллером. Он контролирует работу до восьми светофоров переезда. Телекоммуникационные модемы использовались для дистанционного управления сигнальными устройствами. Система РАСП-4Ф может взаимодействовать с различными устройствами станций управления железнодорожным движением. Внутреннее пространство контейнера показано на рис.5.
Рис. 5 Образец системы обработки «2 из 2» и внутренняя часть контейнера
Сводка
Представленные в статье системы составляют лишь избранную часть железнодорожной инфраструктуры. Используемые в настоящее время решения – в первую очередь компьютерные системы, связанные с управлением и контролем железнодорожного движения – отвечают всем требованиям безопасности, а технические решения находятся на европейском и мировом уровне.
В статье использованы фотографии: из собственных источников, Лаборатория систем управления железнодорожным движением - Факультет транспорта и электротехники, Технологический и гуманитарный университет в Радоме, Kombud S.A. Авторы выражают благодарность компании Konsbud S.A. от Радома за предоставленные материалы и фотографии.
проф. доктор хаб. англ. Анджей Левински 9000 4
доктор инж. Томаш Пержинский 9000 4
Университет технологий и гуманитарных наукК. Пуласки в Радоме
Факультет транспорта и электротехники 9000 4
Ссылки 9000 4
1. М. Домброва-Байон, Основы управления железнодорожным движением. Функции, требования, техническое описание, изд. II, Издательство Варшавского технического университета, Варшава, 2007.
.2. А. Левинский, Т. Пержинский, Л. Бестер, Компьютерный анализ безопасности в системах управления железнодорожным движением, Журнал КОНБиН № 2 (26) / 2013, Системы безопасности и надежности, Варшава 2013.
3. А. Левински, Т. Пержински, М. Сергейчик, А. Торунь, Надежность на железнодорожном транспорте и возможности ее повышения, Международная научная конференция, Институт железнодорожного транспорта, Варшава, 2013.
4. А. Левински, Современные системы железнодорожной телематики, Изд-во Радомского технического университета, Радом, 2012.
.5. Т. Пержиньски, М. Сергейчик, Открытый рынок железных дорог в Польше – надежность систем управления движением с использованием компьютерных технологий, конференция SITK, Варшава 2013.
6. PKP Polskie Linie Kolejowe SA, годовой отчет за 2008 и 2012 гг.
7. Материалы компании Kombud SA в Радоме и материалы компании Siemens.
* В соответствии с этим принципом ни одна неисправность не может быть причиной возникновения опасной (катастрофической) ситуации, кроме того, она должна быть обнаружена в кратчайшие сроки, после чего должна быть инициирована защитная реакция, приводящая к аварийному управлению (в системах управления железнодорожным движением достигает состояния, обеспечивающего ограниченный объем движения поездов).
.90 000 Общественный транспортЭпидемия коронавируса повлияла на подготовку производства новых поездов метро для Варшавы. Производитель, компания из Škoda Transportation, гарантирует, что пока все идет в соответствии с договорными сроками. Уже утверждены расчеты габарита автомобиля, в ближайшее время будет представлен макет кабины водителя. Производитель также обеспечил поставки большинства комплектующих, в том числе от польского Medcom.
В январе Metro Warszawskie подписала контракт со Škoda Transportation на поставку 37 новых одноместных поездов метро, состоящих из шести вагонов.Его стоимость составляет 1,308 млрд злотых нетто. Контракт также предусматривает опцион на поставку еще восьми поездов.— Это знаковый контракт для компании «Шкода Транспортейшн», несмотря на ее 160-летнюю историю автомобилестроения. За недавнюю историю мы доставили продукцию более чем в 50 стран мира. За годы работы наша компания также накопила большой опыт в производстве и модернизации поездов метрополитена, — говорит Михал Тобрман из пресс-службы производителя. В нем упоминается модернизация вагонов пражского метрополитена, комплектация тягового оборудования для поездов метро в Будапеште, Киеве, Казани (Россия), Сучжоу (Китай), а также поставка поездов метро для Санкт-Петербурга (Россия).
Производитель поставит шестивагонные поезда общей длиной 118,2 м, изготовленные из алюминиевых коробов. Как хвалит Škoda, поезда допускают полное электродинамическое торможение во всех режимах, отдавая предпочтение рекуперативному торможению, при котором энергия возвращается в сеть.
Производитель минимизирует последствия коронавируса
Как уверяют в Škoda, рабочие встречи с Варшавским метрополитеном, посвященные всем вопросам, связанным с выполнением контракта, проводятся регулярно.- Нынешний кризис с коронавирусом также оказал некоторое влияние на проект, но мы смогли поддерживать регулярные еженедельные встречи с клиентами. Мы прилагаем все усилия, чтобы минимизировать негативное влияние текущей ситуации с коронавирусом на своевременное выполнение графика проекта, — говорит Тобрман.
Однако пока, несмотря на пандемию, все сроки, указанные в договоре, соблюдены. - Например, валидирован расчет габарита транспортного средства. Продолжаются приготовления относительно экстерьера, планировки и интерьера поезда.— Мы заканчиваем макет кабины водителя, — говорит Михал Тобрман. Вскоре он будет представлен заказчику на заводе в Пльзене. - Благодаря этой уникальной модели мы можем показать часть салона автомобиля и вместе доработать окончательную компоновку отдельных элементов салона, - указывает представитель производителя. Следующим важным этапом станет передача и утверждение технических требований к эксплуатации автомобиля.
Сотрудничество с польскими субпоставщиками
Компания Škoda также находится в постоянном контакте с субпоставщиками.- В течение нескольких месяцев мы интенсивно работали с нашими поставщиками, чтобы уточнить все необходимые требования, и теперь у нас есть большая часть основных компонентов. Конечно, трудности, связанные с COVID-19, коснулись и наших поставщиков, но мы все прилагаем все усилия, чтобы свести к минимуму их негативное влияние на график проекта, — говорит Михал Тобрман.
Польские субподрядчики также примут участие в строительстве поездов. - Мы наладили тесное сотрудничество с нашим основным польским партнером компанией Medcom, которая будет отвечать за поставку основного преобразователя и вспомогательного преобразователя для наших вагонов метро.Мы очень довольны этим сотрудничеством. Помимо Medcom, будут и другие польские поставщики, — говорит Тобрман.
Первый поезд должен быть доставлен в течение 20 месяцев. Это означает, что поезд прибудет в Варшаву на рубеже сентября и октября 2021 года. Акт об утверждении типа должен быть своевременно передан до конца 23-го месяца с даты подписания контракта. В настоящее время идет конкурс на название поезда.